Перенос параметров ПИД-регулятора в нечеткий контроллер
Третий шаг в процедуре проектирования нечетких контроллеров − перенести параметры ПИД-регулятора в линейный нечеткий контроллер.
Входом нечеткого ПИД-контроллера являются три входных сигнала: ошибка, интеграл ошибки и производная ошибки, а выходом управляющий сигнал (рис. 1). В отличие от четкого ПИД- регулятора нечеткий ПИД- контроллер имеет четыре коэффициента усиления: по ошибке KE, по производной ошибки KCE,
по интегралу ошибки KIE, по выходу KU. Функция f описывает преобразование вход-выход нечеткого ПИД-контроллера.
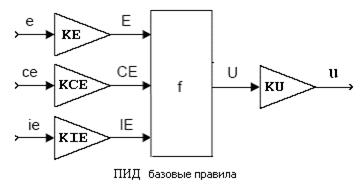
Рис. 1
Однако базовые правила с тремя входами просто написать, но они получаются весьма пространными, и, кроме того, правила, содержащие в качестве входов интеграл ошибки, могут быть причиной неприятностей, связанных с накоплением сигнала на интеграторе (wind up), другими словами, с «залипанием интегратора», обусловленным насыщением исполнительного устройства.
Поэтому обычно осуществляют автономное (отдельное) от правил вычисление интегральной составляющей, так что нечеткий ПИД-контроллер проектируют как параллельное соединение нечеткого ПД-контроллера и интегратора, т.е. нечеткий ПД+И (НПД+И) контроллер (рис. 2).
Выход нечеткого ПД-контроллера в общем случае есть нелинейная функция ошибки и скорости изменения ошибки,
U1(t)= f(KE*e(t), KCE*ce(t)). (3)
Снова функция f является отображением связи вход-выход, но уже нечеткого ПД-контроллера, и на этот раз ей соответствует графическое отображение в виде поверхности управления.
Таким образом, выход нечеткого ПИД- контроллера является функцией трех входов
 . (4)
. (4)
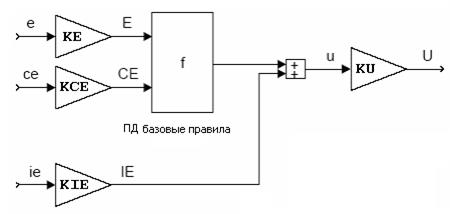
Рис. 2
Линейная аппроксимация (4), при которой f –линейная функция, имеет вид
 (5)
(5)
 .
.
В последнем выражении мы предполагаем, что коэффициент усиления  не равен нулю. Из сравнения (2)
не равен нулю. Из сравнения (2)

и (5) получаем соотношения, связывающие коэффициенты усиления (параметры) четкого и линейного нечеткого ПИД-контроллеров
 =Kp , (6)
=Kp , (6)
 =Td , (7)
=Td , (7)
 . (8)
. (8)
Полученный контроллер обладает всеми достоинствами ПИД управления, но также не лишен неблагоприятных эффектов, связанных с резкими скачками производной и залипанием интегратора.
Пример 3. Рассмотрим нечеткое ПД+И управление для объекта с
передаточной функцией
Предположим, что в результате настройки четкого ПИД-регулятора найдены его параметры Kp=4,8; Td =15/32;1/  =8/15. Пусть максимальное значение ошибки равно 1 и выбран универсум, равный 100.При этом, чтобы полностью использовать весь диапазон универсума возможных значений ошибки положим =100 (см. ниже параграф 5). Тогда с помощью (6) определяем
=8/15. Пусть максимальное значение ошибки равно 1 и выбран универсум, равный 100.При этом, чтобы полностью использовать весь диапазон универсума возможных значений ошибки положим =100 (см. ниже параграф 5). Тогда с помощью (6) определяем
 =Kp / = 4,8/100.
=Kp / = 4,8/100.
Затем, используя (7), находим коэффициент скорости изменения ошибки
 = * Td=100*15/32.
= * Td=100*15/32.
Наконец, последний из коэффициентов усиления определяем с помощью (8)
 = *1/ =100*8/15.
= *1/ =100*8/15.
При этом легко убедиться, что реакция линейного НПД+И-контроллера на
ступенчатый вход в точности идентична реакции четкого ПИД-регулятора. Оценка максимальных значений входных сигналов показывает, что |Emax|  100 и |CEmax| 55. Таким образом, насыщения не имеет места, т.е. входные сигналы не выходят за пределы универсумов для E и CE.
100 и |CEmax| 55. Таким образом, насыщения не имеет места, т.е. входные сигналы не выходят за пределы универсумов для E и CE.
Дата добавления: 2021-01-11; просмотров: 604;
Поиск по сайту
Узнать еще
- Автоматизированная система контроля геометрических параметров рам тележек ЛИС-РТ-3
- Автоматизированная система контроля технологических параметров ЮВС
- АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИЯ ПАРАМЕТРОВ ТОВАРНО-ТРАНСПОРТНЫХ ПОТОКОВ
- Алгоритм определения параметров
- Амортизационные отчисления производятся только до полного переноса стоимости основных фондов на себестоимость продукции.
- Анализ параметров методом доверительных интервалов
- АНАЛИЗ ПАРАМЕТРОВ ТОЧНОСТИ МЕХАНИЧЕСКОЙ ОБРАБОТКИ МЕТОДОМ МАТЕМАТИЧЕСКОЙ СТАТИСТИКИ
- Анализ переноса и сопротивления — аналитическая психотерапия как эмоциональный опыт

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
