Преобразование вход-выход
Два входа и один выход для контроллера приводят к двухмерной таблице, которую можно отобразить графически в виде поверхности c целью визуального наблюдения. Связь между одним выходом и одним входом контроллера может быть представлена в виде графика зависимости вход-выход. Эти поверхности и графики зависимости помогают при проектировании, когда решается задача выбора ФП и конструирования правил.
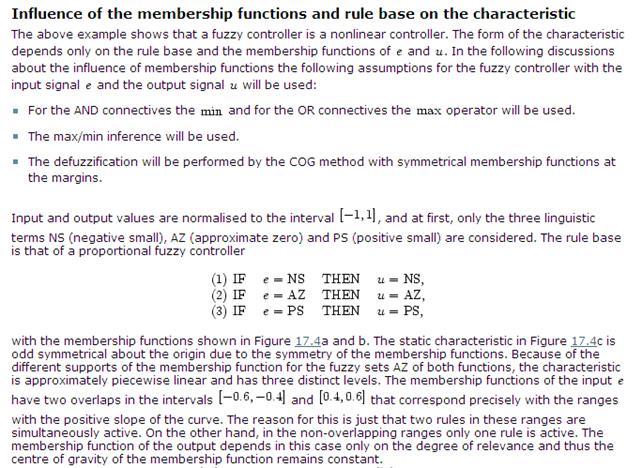
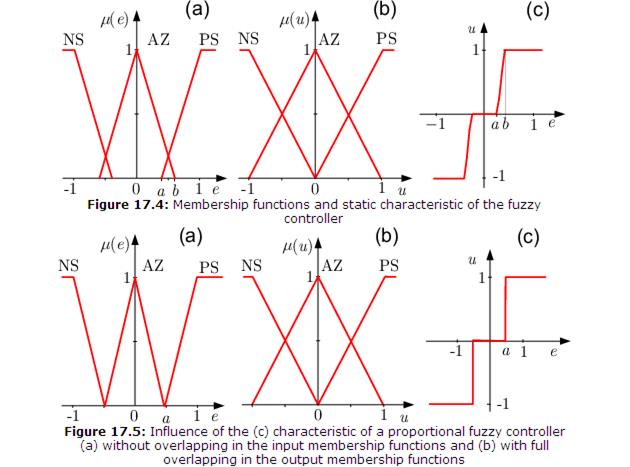
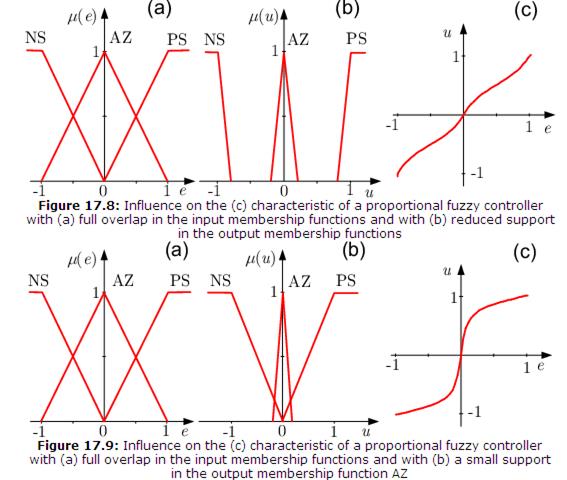
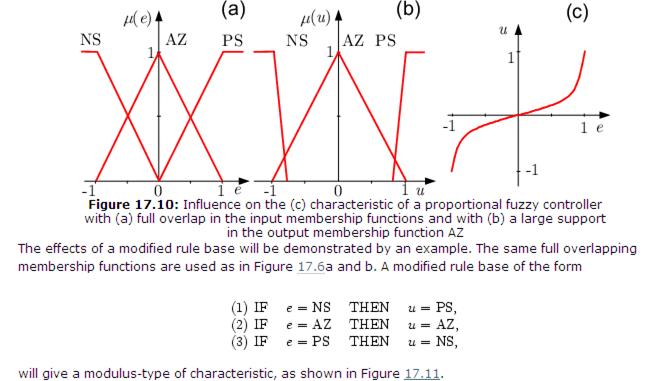
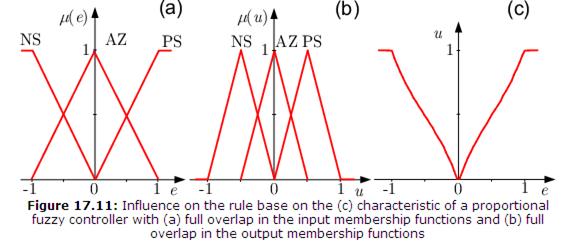
Кривая управления. Формой поверхности и графиков можно управлять в некоторой степени за счет манипулирования функциями принадлежности (изменения вида последних). Чтобы наглядно показать влияние вида ФП на характер связи вход - выход, рассмотрим контроллер с одним входом и одним выходом (без потери общности). Нечеткая база правил, называемая пропорциональной, для этого контроллера имеет вид:
1. Если ошибка есть Отр, то выход (управление) есть Отр,
2. Если ошибка есть Нуль, то выход (управление) есть Нуль, (2.37)
3. Если ошибка есть Пол, то выход (управление) есть Пол
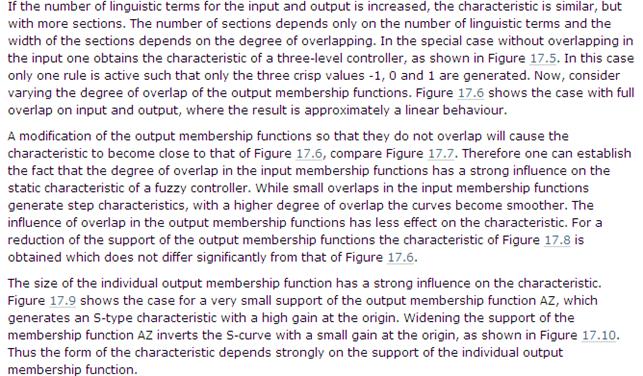
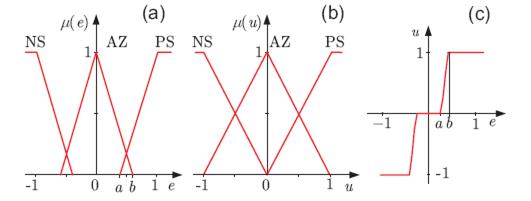
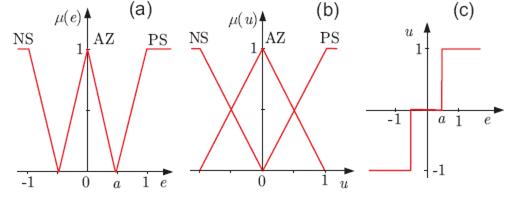
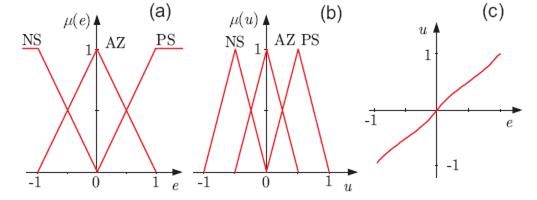
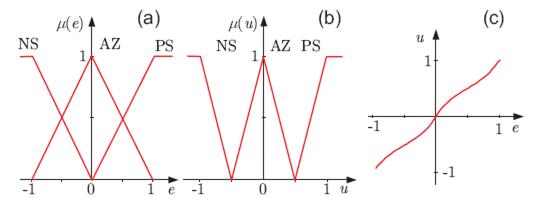
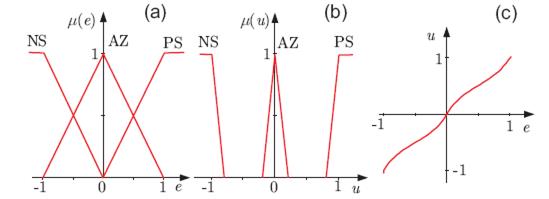
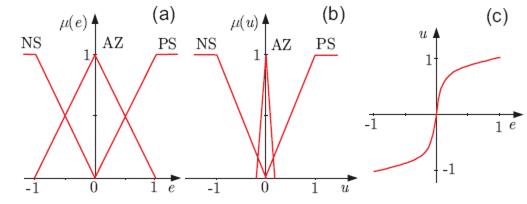
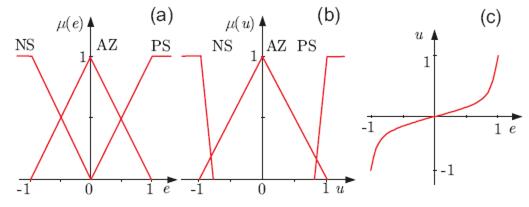
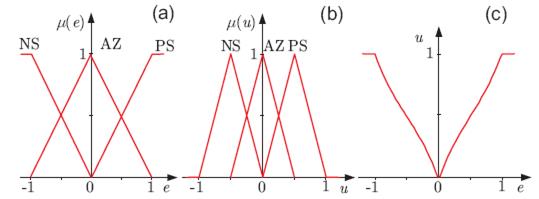
и приводит к шести различным графическим зависимостям, представленным на рис. 2.12. Крайняя правая колонка содержит графики зависимости вход-выход, и каждый ряд на рис. 2.12 отображает поведение различных контроллеров. Этим контроллерам соответствуют ФП терм-множества входов в колонке ЕСЛИ и ФП терм-множества выхода в колонке ТО. Результат (график зависимости вход-выход) зависит также от выбора других субъектов проектирования, которые в данном случае выбраны так: для активации используется алгебраическое произведение * (prod), для аккумуляции применяется операция maxи для дефаззификации - метод центра тяжести. Если имеется два или более входов, то операция * должна быть выбрана для конъюнкции (для связки и). Указанный выбор необходим и достаточен для получения линейной зависимости (смотри далее).
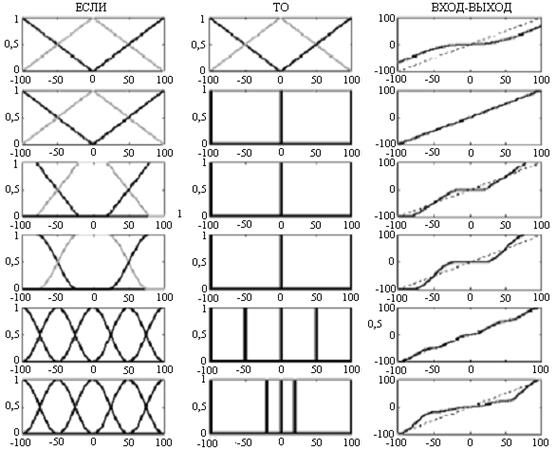
Рис. 2.12
Последующие комментарии относятся к каждому ряду (строке), представленному на рис. 2.12.
1. Треугольные ФП, примененные как в условии, так и в заключении, приводят в результате к волнообразной характеристике (зависимости). По сравнению с линейным нечетким П-контроллером (пунктирная линия)
коэффициент усиления не остается неизменным. Еще одна небольшая проблема: не используется полный диапазон выходного универсума, следовательно, невозможно использовать выходной сигнал на 100 %. Другая проблема: локальный коэффициент усиления меньше или равен коэффициенту линейного контроллера.
2. Применение синглтонов в качестве ФП выхода снимает проблему, связанную с неполным использованием диапазона выходного сигнала. Одноточечному множеству (терму) пол соответствует выход –100, нуль– 0, отр– - 100. При этом преобразование вход-выход является линейным (u=e).
3. ФП с уступами (с горизонтальными отрезками) приводят к появлению горизонтальных отрезков в характеристике вход-выход, а также к высокому коэффициенту усиления при больших отклонениях входного сигнала от нуля. Расширение плоской части среднего терма входа соответственно увеличивает длину горизонтального участка характеристики, расположенного в окрестности нуля. Чем меньше перекрытие между соседними ФП термов входа, тем «круче» наклонные отрезки характеристики.
4. Если резкие изменения в угловых точках характеристики вход-выход порождают проблемы, то такие изменения можно устранить путем использования нелинейных ФП для термов входа.
5. Добавление термов в терм-множество входа лишь делает характеристику вход- выход более « ухабистой».
6. С другой стороны при большом числе термов легче растягивать горизонтальный отрезок около нуля за счет перемещения синглтонов.
С точки зрения теории управления данный нечеткий контроллер представляет собой статический (безынерционный) нелинейный элемент, который можно описать с помощью нелинейного алгебраического уравнения
u=f(e).
Эксперименты говорят о том, что путем изменения спецификаций (выбора субъектов) при проектировании можно в определенной степени управлять локальными значениями коэффициента усиления. Использование синглтонов на выходе упрощает решение этой задачи. Во всех рассмотренных на рис. 2.12 случаях в качестве оператора активизации использовалась *, оператора аккумуляции – max, метода дефаззификации COG или COGS. Применение других операторов может дать несколько отличные результаты.
Надо отметить, что приведенные результаты могут быть легко обобщены на трехмерные поверхности.
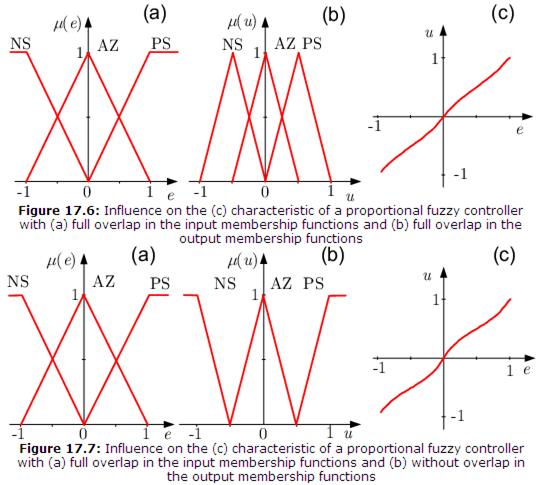
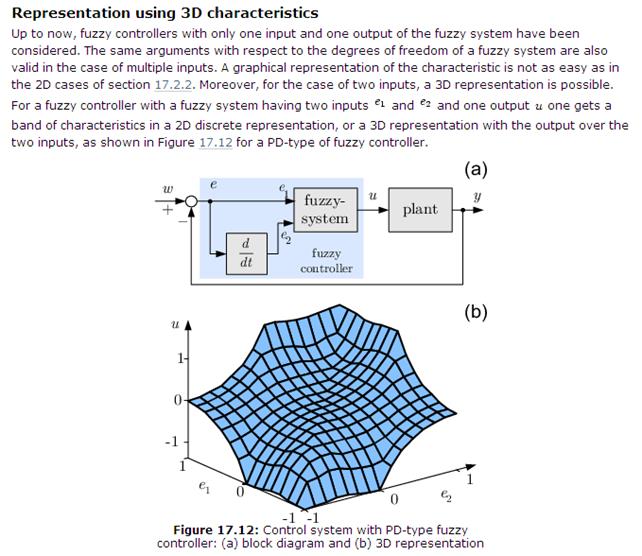

Поверхность управления. Связь между одним выходом и одним входом контроллера может быть представлена в виде графика зависимости вход-выход. При двух входных и одном выходном сигналах графическое отображение вход-выход представляет собой не кривую, а поверхность управления. Рис. 2.13 отображает в виде сетчатой поверхности связь между ошибкой e и скоростью изменения ошибки ce с одной стороны (стороны входа), а с другой стороны − выходом u контроллера. Представленная на этом рисунке картина является результатом применения девяти базовых правил (2.2) с ФП для термов e и ce, показанными на рис. 2.14, и поверхность носит более или менее ухабистый характер. Горизонтально расположенные плоские площадки обусловлены наличием плоских вершин (горизонтальных отрезков) в ФП термов входа.
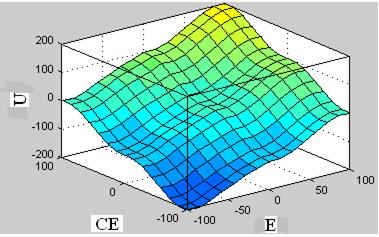
Рис. 2.13
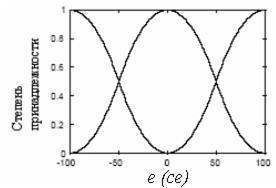
Рис. 2.14
Такая плоская площадка вблизи нулевого состояния, другими словами, точка с координатами (e=0, ce=0) говорит о малой чувствительности контроллера к небольшим отклонениям ошибки и скорости ее изменения от нулевого состояния. Это свойство данного контроллера надо отнести к его достоинствам. Дело в том, что хорошая система должна быть малочувствительной к помехам, когда управляемая величина мало отличается от заданного значения. С другой стороны, указанное свойство является недостатком, если ОУ неустойчив, т.к. в этом случае, чтобы удержать управляемую величину вблизи заданного значения, необходимо обеспечить высокий коэффициент усиления (большую чувствительность) системы вблизи состояния равновесия (нулевой точки).
С точки зрения теории управления нечеткий контроллер с двумя входами e и ce, и одним выходом можно рассматривать как статический нелинейный элемент с двумя входами и одним выходом, описываемый уравнением
u=f(e,ce).
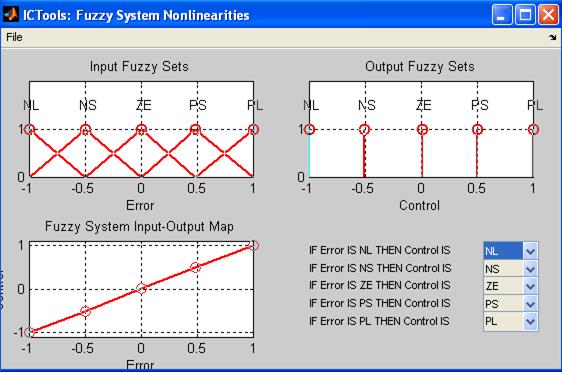
Влияние расположения треугольных функций принадлежностей и синглтонов для синглтонной нечеткой модели с шестью правилами можно исследовать с помощью файла MATLAB6.5\work\ictools-windows-new\fuzzy\fuzzynl.m, открывающего графический интерфейс пользователя ICTools: Fuzzy System Nonlinearities (рис. ниже).
Лекция №13
Имеется три источника возникновения нелинейных свойств нечеткого контроллера.
· Базовые правила. Расположение, форма и число ФП терм-множества входа, так же как и нелинейное масштабирование входного сигнала, являются причиной нелинейного преобразования вход-выход. Да и сами правила часто определяют нелинейную стратегию управления.
· Механизм инференции. Если связки и и или реализуются, как в примере, с помощью операторов min и max, то это приводит к нелинейности.
· Дефаззификация. Ряд методов дефаззификации носит нелинейный характер.
Можно разработать базовые правила, при которых преобразование вход-выход будет носить линейный характер.
Дата добавления: 2021-01-11; просмотров: 814;
Поиск по сайту
Узнать еще
- Z – преобразование дискретных сигналов
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- Аналого-цифровое преобразование сигналов.
- Быстрое преобразование Фурье
- Ввод статических поправок. Преобразование результатов обработки в формат SEG-Y
- Возможно преобразование эллиптических орбит в параболические и наоборот.
- Вопрос 80. Ассимиляция и фотосинтез. Преобразование энергии при фотосинтезе
- Дискретное преобразование Лапласа.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
