Метод центра тяжести для синглтонов (одноточечных множеств)(COGS)
Специальный случай лингвистической модели получается, когда нечеткие множества Bi заключений (выхода), в данном случае управляющего сигнала являются синглтонами (одноточечными множествами). Такие множества представляют собой просто вещественные числа si ,что приводит к следующим правилам
 Если x1 есть A1i и x2 есть A2i и … xr есть Ari , то u есть si,
Если x1 есть A1i и x2 есть A2i и … xr есть Ari , то u есть si,  .
.
Эта модель называется синглтонной моделью. Более простая версия формулы (2.33) (метод нечетких средних) обычно используется для определения четкого выхода такой модели:
 . (2.35)
. (2.35) 
Здесь  позиция i-го синглтона в универсуме выхода,
позиция i-го синглтона в универсуме выхода,  равно возбуждающей силе
равно возбуждающей силе  i-го синглтона, N- число правил. По формуле (2.35) для рассмотренного в на рис. 2.8 примера было вычислено четкое значение управляющего сигнала, равное -60,5. Оно представлено синглтоном в виде тонкой вертикальной линии на рис.2.8 (крайний нижний ряд справа).
i-го синглтона, N- число правил. По формуле (2.35) для рассмотренного в на рис. 2.8 примера было вычислено четкое значение управляющего сигнала, равное -60,5. Оно представлено синглтоном в виде тонкой вертикальной линии на рис.2.8 (крайний нижний ряд справа). 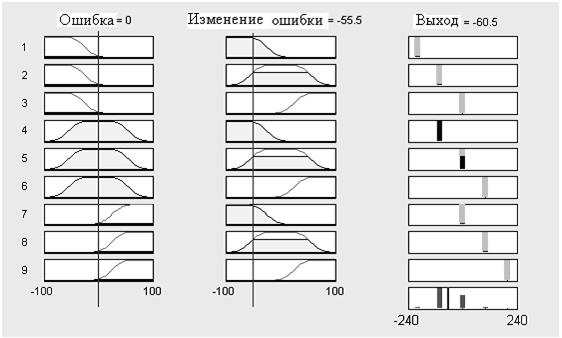
Этот метод дефаззификации относительно предпочтителен с точки зрения вычислительной сложности и к тому же u − функция, дифференцируемая в отношении синглтонов , что благоприятно с точки зрения его (метода) использования в нейронечетких системах (см. ниже).
Заметим, что синглтонная нечеткая модель принадлежит к общему классу аппроксимирующих функций (аппроксиматоров), называемых разложением на базисные функции и имеющих вид
 .
.
Большинство структур, используемых для идентификации нелинейных систем, таких, как искусственные нейронные сети, нейронные сети с радиальными базисными функциями или сплайны принадлежат к этому классу аппроксиматоров. В синглтонной модели для r входов базисными функциями  являются нормализованные степени истинности (возбуждающие силы) правил
являются нормализованные степени истинности (возбуждающие силы) правил
 ,
,
и постоянными являются заключения (синглтоны) правил.
Теорема об универсальной аппроксимации.
Используя теорему Стона-Вейерштрассса, Ванг (1992) показал, что нечеткая логическая модель в форме
Если x есть Ai и y есть Bi,то z есть Ci, i = 1, . . . , n
• сгауссовскими функциями принадлежности
 ,
,  ,
,  ,
,
• синглтонной фаззификацией
 и
и  ,
,
• нечеткой конъюнкцией в виде алгебраического произведения
 ,
,
• нечеткой импликацией в виде алгебраического произведения
 ,
,
• дефаззификацией в форме центра тяжести
 ,
,
где  является центром (ядром) ФП
является центром (ядром) ФП  , представляют собой универсальные аппроксиматоры, т.е. они могут аппроксимировать любую функцию на компактном (замкнутом) множестве с произвольной точностью, а именно, он доказал следующую теорему.
, представляют собой универсальные аппроксиматоры, т.е. они могут аппроксимировать любую функцию на компактном (замкнутом) множестве с произвольной точностью, а именно, он доказал следующую теорему.
Теорема. Для данной вещественно значимой непрерывной функции g на компактном (замкнутом) множестве U и заданном произвольном  >0, существует нечеткая логическая модель с выходом f таким, что
>0, существует нечеткая логическая модель с выходом f таким, что
 .
.
Опустить
Биссектриса площади (BOA). В этом методе u =  , где значение определяется из уравнения
, где значение определяется из уравнения
 . (2.36)
. (2.36)
Из (2.36) следует, что uравняется абсциссе вертикальной линии, которая делит площадь под кривой  выходной переменной на две равные части. В (2.36) x − текущее значение точки в универсуме, − функция принадлежности выхода, Min − левое крайнее значение универсума, Max − правое крайнее значение универсума. Вычислительная сложность этого метода относительно высока, и, кроме того, он может породить сомнения, касающиеся конечного результата. Например тогда, когда нечеткое множество выхода содержит два синглтона с равными степенями истинности, симметрично расположенных относительно нулевого значения. Отсюда можно сделать вывод, что в дискретном случае этот метод применять нельзя.
выходной переменной на две равные части. В (2.36) x − текущее значение точки в универсуме, − функция принадлежности выхода, Min − левое крайнее значение универсума, Max − правое крайнее значение универсума. Вычислительная сложность этого метода относительно высока, и, кроме того, он может породить сомнения, касающиеся конечного результата. Например тогда, когда нечеткое множество выхода содержит два синглтона с равными степенями истинности, симметрично расположенных относительно нулевого значения. Отсюда можно сделать вывод, что в дискретном случае этот метод применять нельзя.
Метод среднего максимума (MOM). Интуитивный подход − выбрать управление, которое соответствует максимальному значению степени принадлежности выхода, т.е. выбрать наиболее правдоподобное управление. Может случиться, что существует несколько таких максимумов и общий подход − выбрать среднее из значений выхода, соответствующих этим максимумам. Такой метод игнорирует форму функции принадлежности выхода, но обладает относительно невысокой сложностью.
Метод левого максимального значения (LM) и метод максимального правого значения (RM). Другая возможность − выбрать управление, соответствующее крайнему левому максимуму (LM) или крайнему правому (RM) максимуму функции принадлежности выходной переменной. В случае когда объектом управления является робот, он должен выбрать между направлениями движения налево или направо, чтобы избежать столкновения с препятствием, находящимся перед ним. При этом дефаззификатор должен выбрать одно из этих направлений, но ни в коем случае не направление между ними.
Читать
Дата добавления: 2021-01-11; просмотров: 758;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- I. Гидрометаллургические методы
- I. Определение и структура методов обучения.
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. Понятие о методах воспитания.
- I. Темы рефератов, соответствующие актуальным проблемам в содержании основных разделов программы курса «Философия и методология науки»

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
