Z – преобразование дискретных сигналов
2.4.1. Определение z – преобразования
При математическом описании дискретных сигналов в выражении для спектра  важную роль играет функция
важную роль играет функция  , которая при преобразованиях возводится в целую степень
, которая при преобразованиях возводится в целую степень  . Однако эта функция является трансцендентной, что существенно усложняет спектральный анализ. Для упрощения анализа вводят новую переменную
. Однако эта функция является трансцендентной, что существенно усложняет спектральный анализ. Для упрощения анализа вводят новую переменную  , которая связана с частотой
, которая связана с частотой  выражением:
выражением:
 .
.
При такой замене спектр дискретизированного сигнала преобразуется в рациональную функцию переменной  :
:
 , (2.16)
, (2.16)
где  - оригинал
- оригинал  - преобразования;
- преобразования;
 - - изображение функции
- - изображение функции  .
.
Полученное выражение называется прямым - преобразованием.
 - преобразование дискретных сигналов является частным случаем преобразования Лапласа для дискретизированных сигналов (
- преобразование дискретных сигналов является частным случаем преобразования Лапласа для дискретизированных сигналов (  ).
).
Вводится для:
- полезно иметь дискретный аналог преобразования Лапласа, справедливый для более широкого класса сигналов;
- при аналитических исследованиях и расчетах пользоваться - преобразованием более удобно.
Пример z – преобразования
Пусть необходимо получить z – изображение дискретного единичного скачка:
В результате применения z – преобразования к дискретному единичному скачку можно получить:
 .
.
Полученное выражение представляет собой сумму бесконечной геометрической прогрессии:
при  .
.
Соответственно, z – изображение дискретного единичного скачка имеет вид:
 .
.
2.4.2. Свойства z – преобразования
1. Линейность:
 имеет z-преобразование
имеет z-преобразование  .
.
2. Задержка:
Последовательность  имеет Z-преобразование
имеет Z-преобразование  .
.
3. Обращение во времени:
Последовательность  имеет z-преобразование
имеет z-преобразование  .
.
4. Масштабирование:
Последовательность  имеет z-преобразование
имеет z-преобразование  .
.
5. Свертка:
Последовательность  , характеризующая связь выходного сигнала через входной и импульсную характеристику дискретного фильтра
, характеризующая связь выходного сигнала через входной и импульсную характеристику дискретного фильтра  , имеет Z-преобразование:
, имеет Z-преобразование:
 .
.
2.4.3. Обратное z – преобразование
Обратное z-преобразование удобно использовать:
- при отыскании отклика дискретной системы на дискретный сигнал;
- при отыскании импульсной характеристики дискретной системы при известной ее передаточной функции.
Отыскание оригинала по заданному изображению  производится с помощью обратного z – преобразования:
производится с помощью обратного z – преобразования:
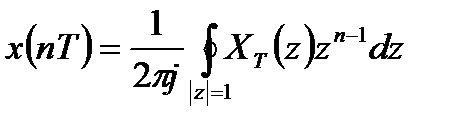 . (2.17)
. (2.17)
Непосредственное вычисление интеграла (2.17) сложно или невозможно. Поэтому на практике обратное z-преобразование получают более простыми способами:
1. С использованием таблицы соответствий;
2. На основании теоремы Коши о вычетах;
3. Разложение изображения  на простые дроби.
на простые дроби.
Для вычисления обратного z-преобразования с использованием таблицы соответствий в справочнике, содержащем таблицы оригиналов и соответствующих изображений, находят оригинал для заданного изображения: Таблица 2.1. Достоинством способа является отсутствие необходимости вычисления интеграла. Недостатком способа является ограниченное число изображений в таблице.
Таблица 2.1. Таблица соответствия
Последовательность 
| z-изображение | |
| 1. | 
| |
| 2. | 
| 
|
| 3. | 
| 
|
| 4. | 
| 
|
| 5. | 
| 
|
| 6. |
|  ; ;
 ; ;
 ; ;
 . .
|
| 7. |
|  ;
;
; ;
;
;
 . .
|
Если z-изображение отсутствует в таблице соответствий, можно использовать разложение изображения на простые дроби. Например:
 .
.
В этом случае, пользуясь свойством линейности z – преобразования и Таблицей 2.1 можно получить:
 .
.
Вычисление обратного z – преобразования с использованием вычетов основано на теореме Коши: интеграл (2.17) вычисляется как сумма вычетов во всех особых точках (полюсах):
 , (2.18)
, (2.18)
где  - вычет функции
- вычет функции  в k-ом полюсе
в k-ом полюсе  .
.
Например, для изображения  имеется один полюс
имеется один полюс  . Поэтому для получения обратного z – преобразования необходимо вычислить только один вычет:
. Поэтому для получения обратного z – преобразования необходимо вычислить только один вычет:
 .
.
Дата добавления: 2020-08-31; просмотров: 1664;
Поиск по сайту
Узнать еще
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- Аналого-цифровое преобразование сигналов.
- Аппаратура эры дискретных полупроводниковых приборов- это аппаратура третьего поколения.
- АРХИТЕКТУРА РАДИОПЕРЕДАТЧИКОВ С ПРЯМЫМ ЦИФРОВЫМ ФОРМИРОВАНИЕМ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ
- Быстрое преобразование Фурье
- Ввод статических поправок. Преобразование результатов обработки в формат SEG-Y

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
