Дискретное преобразование Лапласа.
Служат для упрощения описания импульсных систем, которые включают в себя и непрерывные элементы. Непрерывные сигналы преобразуют в фиктивные дискретные сигналы. Тогда вместо обычных дифференциальных уравнений используют и дискретные преобразования Лапласа.
Поскольку выходной сигнал импульсного элемента зависит от непрерывного входного сигнала только в дискретные моменты времени, а именно в начале каждого периода повторения импульсов, если замкнуть непрерывную функцию U(t) на его вход дискретной функцией, значение которой в моменты n·Tn, (n=0,1,2,3,…) совпадают со значением непрерывной функции, а в остальное время равно нулю. Такую дискретную функцию называют решетчатой функцией.
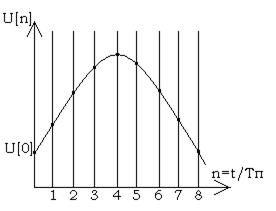
График решетчатой функции, записанной в нормированной форме.
τ=t/Tn ; Tn=1 U[n] .
Дискретным преобразованием Лапласа называется функциональное преобразование решетчатых функций в виде U[n], U[n·Tn], которое определяется выражением:
D{U[n·Tn]}=U*(p)=∑U(n·Tn)·e-p·n·Tn .
Для нормированной решетчатой функции:
D{U[n]}=U*(g)=∑U(n)·e-g·n , где
g=p·Tn - безразмерная переменная.
Производят Z-преобразование.
z{U[n]}=U*(z)=∑U[n]·z-n .
Так как дискретные преобразования Лапласа аналогично обычному преобразованию Лапласа, то при его использовании применяют аналогичные правила и теоремы, которые позволяют найти решетчатую функцию, исследовать установившиеся и переходные процессы в импульсных системах, решить разностные уравнения.
Скорость изменения решетчатой функции характеризуется ее первой разностью:
ΔU[n]=U[n+1]-U[n] .
Ускорение – второй разностью решетчатой функции:
Δ2U[n]=ΔU[n+1]-ΔU[n] .
Реакурентное соотношение – к-ой разностью решетчатой функции:
ΔкU[n]=Δк-1U[n+1]-Δк-1U [n] .
Соотношение между решетчатой функцией и ее разностями различных порядков определяет уравнение в конечных разностях, так называемое разностное уравнение.
Уравнение линейных разностей с постоянными коэффициентами можно записать в виде:
вкΔкx[n]+ вк-1Δк-1x[n]+…+ в0x[n]=U [n] .
U[n] – известная функция, которую можно записать в память, извлечь из памяти и использовать.
X[n] – искомая функция, представляющая собой решение разностного уравнения.
Решением разностного уравнения является функция обратного z-преобразования, которая представляется в виде суммы элементарных членов:
x[z]=c0+c1 ·z-1+c2·z-2+=3+1· z-1+1,2·z-2
Поскольку: z=eq=epTn
z-n=e-pTn·n=e-pT
При цифровом управлении строят цифровые корректирующие устройства (ЦКУ).
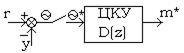
ЦКУ обеспечивает умножение на некий коэффициент числового значения, поступающего на вход ЦКУ, причем коэффициент будет различен в разные моменты времени, в этом и заключается цифровая коррекция или регулирование, то есть
m[0]=k0·Ө*[0]= k0·r[0]- k0·y[0]
m[1]=m[Tn] = k1· Ө*[Tn]
m[2Tn]= k2· Ө*[2·Tn]
- - - - -
m[nTn]= kn· Ө*[n·Tn]
M[z]= k0· Ө*[0·Tn]·z-0+ k1·Ө*[1·Tn]·z-1 + k2·Ө*[2·Tn]·z-2+ kn·Ө*[n·Tn]·z-n= ∑kj· Ө*[j·Tn]·z-j
Аналогично можно расписать для ошибки:
Ө*[z]=∑Ө*[j·Tn]·z-j
Тогда передаточная функция ЦКУ будет записана:
D[z]=M*[z]=∑kj· Ө*[j·Tn]·z-j =∑m[j·Tn]·z-j
Ө*[z] ∑Ө*[j·Tn]·z-j ∑Ө*[j·Tn]·z-j
Пусть:
Ө*[0]=Ө*[0· Tn]=1 m*[0]=1
Ө*[1· Tn]=0,8 m*[1· Tn]=0,25
Ө*[2· Tn]=0,39 m*[2· Tn]=-0,568
Ө*[3· Tn]=0,082 m*[3· Tn]=-0,432
D[z]=1+0,25·z-1 -0.568·z-2-0,432·z-3
1+0.8·z-1+0,39·z-2+ 0,082·z-3
Цифровую передаточную функцию реализуют на ЭВМ, используя рекурентные соотношения:
m*[n]=Ө*[n]+0,25·Ө*[n-1] -0,568·Ө*[n-2]-0,432· Ө*[n-3]-0,8 ·m*[n-1] -0,39·m*[n-2]-0,082· m*[n-3]
tпп=4·Tп (4 периода дискретности).
В ЭЛУ ЭВМ реализует подпрограмму:
Проверка аварийного режима и готовности оборудования с последовательным опросом датчиков и конечных выключателей:
- подача шихты или испаряемого материала;
- втягивание слитка;
- расчет отклонения
- программа проверки температуры;
- программа проверки давления.
Рассмотрим фрагмент подпрограммы расчета момента окончания процесса напыления.
Подпрограмма реализует алгоритм, интегрируя во времени скорости подачи испаряемого материала:
Q[i·Tп]=Q[(i-1)·Tп]+Tп·νп [i·Tп] , 1≤i≤n
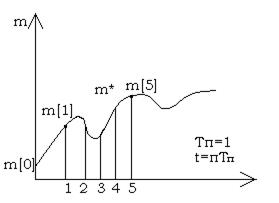
В индукционных нагревательных установках управляющая ЭВМ на каждом шаге квантования решает электромагнитную и тепловую задачи – моделирует переходные процессы.
Важной проблемой при построении ЦСУ является период квантования Tп-?
Tп=f (свойств материала, Өтехнич), если в течении любого цикла опроса решается Мзадач (Мз=10) и для каждой задачи необходимо к=103 машинных команд. Тогда быстродействие машин для плавления печью N[опер/сек].
N> Мз·к/Ту=10·103/67≈150оп/сек
Для управления высокочастотной сваркой:
N> Мз·к/Ту=10·103/6,7·10-3≈1,5·106оп/сек
Время цикла определяется тем рабочим временем, за которое управляемая переменная Өp изменяется на допустимую погрешность регулирования ΔӨp.
Температура расплава может быть выражена в зависимости:
Өp=Р· 1 ·t , Tп<Tр
M·c
Р - управляющая переменная;
M- масса;
c- теплоемкость.
Пусть для сталеплавильной печи:
c=0,67·103Дж/кг·°С , Р=500кВт , М=1000кг
ΔӨ=50°С
Tп<ΔӨр·М·с=50·1000·0,67·103
Р 500·1000
Пусть время нагрева под ВЧ сварочной трубы от исходной температуры до температуры плавления:
tн=0,2с
ΔӨр=50°С
Tп< tн ·ΔӨр=0,2·50=6,7·10-3
Өплавл 1500
МП с высокой производительностью - это дорогие устройства и часто на практике проектируют двух уровневые и супервизорные ЦУ.
В этом случае ЭВМ вычисляет лишь уставки локальным регулятором.
Эти регуляторы могут быть реализованы как в аналоговом виде (операционный усилитель) на вход которых уставка подается в цифроаналоговых преобразованиях, так и в виде аппаратных или МП устройств, обладающих большим быстродействием.
В аварийных режимах локальный регулятор может управляться вручную.
Дата добавления: 2021-11-16; просмотров: 590;
Поиск по сайту
Узнать еще
- Z – преобразование дискретных сигналов
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- Аналого-цифровое преобразование сигналов.
- Быстрое преобразование Фурье
- Ввод статических поправок. Преобразование результатов обработки в формат SEG-Y
- Возможно преобразование эллиптических орбит в параболические и наоборот.
- Вопрос 80. Ассимиляция и фотосинтез. Преобразование энергии при фотосинтезе
- Давление Лапласа. Капиллярные явления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
