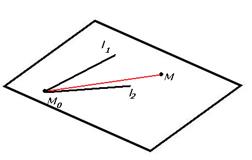
Вывод уравнения плоскости по точке и двум направляющим.
Пусть даны точка  и 2 направляющих вектора
и 2 направляющих вектора  ими однозначно порождается некоторый параллелограмм, а следовательно и плоскость. Обозначим координаты направляющих, например, так:
ими однозначно порождается некоторый параллелограмм, а следовательно и плоскость. Обозначим координаты направляющих, например, так:  и
и  .
.
Возьмём произвольную точку  . Если она принадлежит плоскости, то вектор
. Если она принадлежит плоскости, то вектор  (показан красным цветом) будет лежать в плоскости, то есть тройка векторов , образует линейно-зависимую систему (ЛЗС).
(показан красным цветом) будет лежать в плоскости, то есть тройка векторов , образует линейно-зависимую систему (ЛЗС).
Тогда определитель равен 0: 
Вычисляя этот определитель, мы получим в качестве результата некоторое уравнение, содержащее x,y,z.
Вывод уравнения прямой в пространстве по точке и направляющему вектору.
Пусть дана точка  с координатами
с координатами  и направляющий вектор
и направляющий вектор  :
:
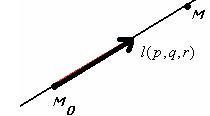
Пусть произвольная точка  с координатами
с координатами  лежит на этой же прямой. Тогда и
лежит на этой же прямой. Тогда и  линейно зависимы, то есть ранг следующей матрицы равен 1:
линейно зависимы, то есть ранг следующей матрицы равен 1:
другими словами, их координаты - пропорциональны, т.е.  тогда получим:
тогда получим:
 .
.
Это канонические уравнения прямой в пространстве.
Теорема о замене.
Пусть в пространстве  над полем
над полем  заданы 2 системы векторов:
заданы 2 системы векторов:
 (1) и
(1) и  (2) . Если каждый вектор системы (1) линейно выражается через систему (2), то будет говорить, что система (1) выражается через (2), обозначается
(2) . Если каждый вектор системы (1) линейно выражается через систему (2), то будет говорить, что система (1) выражается через (2), обозначается  .
.
Если и  , то системы (1) и (2) называются эквивалентными,
, то системы (1) и (2) называются эквивалентными,  .
.
Свойства эквивалентности:
1)  .
.
2) если то  .
.
3) если и  , то
, то  .
.
Лемма. Если и вектор  , то
, то  .
.
Доказательство.
Если , то  . Но при этом , а значит, , то есть каждый вектор системы (1) можно представить в виде линейной комбинации векторов (2).
. Но при этом , а значит, , то есть каждый вектор системы (1) можно представить в виде линейной комбинации векторов (2).
Тогда  а в таком случае, можно перегруппировать слагаемые и получить
а в таком случае, можно перегруппировать слагаемые и получить
 , то есть .
, то есть .
Теорема о замене (Штейница).Пусть в пространстве над полем заданы 2 системы векторов: (1) и (2). Пусть система (1) линейно независима и линейно выражается через (2). Тогда: 1)  ;
;
2) Из системы (2) можно удалить  векторов, так, что оставшиеся векторы, вместе с векторами системы (1) составляют новую систему, эквивалентную (2).
векторов, так, что оставшиеся векторы, вместе с векторами системы (1) составляют новую систему, эквивалентную (2).
Доказательство.1) База индукции. Пусть  . Система (1) имеет вид
. Система (1) имеет вид  . Тогда во-первых очевидно, что
. Тогда во-первых очевидно, что  , так как (2) содержит хотя бы один вектор.
, так как (2) содержит хотя бы один вектор.
линейно выражается через , то есть существуют коэффициенты, не все равные 0, так что  . Пусть в этом равенстве
. Пусть в этом равенстве  - наименьший индекс, для которого
- наименьший индекс, для которого  , т.е.
, т.е.  . Тогда можно вектор
. Тогда можно вектор  выразить через систему векторов
выразить через систему векторов  (3):
(3):



 . Итак,
. Итак,  .
.
Докажем, что .
Сначала докажем, что  .
.
 выражаются через (3), так как они принадлежат этой системе (достаточно взять один коэффициент 1, другие 0). А то, что установлено выше.
выражаются через (3), так как они принадлежат этой системе (достаточно взять один коэффициент 1, другие 0). А то, что установлено выше.
 (2)
(2)
(3)
Теперь докажем, что  .
.
выражаются через (2), так как принадлежат ей.
тоже выражается через (2) - это по исходному предположению индукции. Итак, .
2) Индукционный шаг. Пусть при  утверждение верно. Тогда существует система
утверждение верно. Тогда существует система
 (4),
(4),
эквивалентная (2). При этом в ней уже заменено векторов, причём с точностью до перенумерации векторов  в системе (2).
в системе (2).
Вектор  линейно выражается через (2), а значит, и через (4), так как
линейно выражается через (2), а значит, и через (4), так как
 .
.
 .
.
Здесь хотя бы один из коэффициентов  отличен от 0, иначе бы
отличен от 0, иначе бы
выражался через  , что противоречило бы линейной независимости системы (1).
, что противоречило бы линейной независимости системы (1).
Значит, какой-то один из векторов  имеет ненулевой коэффициент (пусть для определённости это будет
имеет ненулевой коэффициент (пусть для определённости это будет  , иначе произведём перенумерацию) а значит, его можно выразить через систему
, иначе произведём перенумерацию) а значит, его можно выразить через систему  (5)
(5)
(его перенести влево, а вправо и поделить на коэффициент, точно так же, как делали в базе индукции).

Итак, есть две системы:
(4)
(5)
где Вектор линейно выражается через (4), а через (5). Все прочие векторы этих систем, очевидно, выражаются через другую систему, так как принадлежат ей (один коэфф. 1, прочие 0). Итак,  , но при этом было , значит,
, но при этом было , значит,  .
.
Итак, возможность замены доказана.
Осталось показать, что . Пусть, напротив,  . Тогда на каком-то этапе замены, в системе (2) уже все векторы заменены на векторы из системы (1) (причём проведено
. Тогда на каком-то этапе замены, в системе (2) уже все векторы заменены на векторы из системы (1) (причём проведено  замен). Тогда при замене
замен). Тогда при замене  -го вектора мы столкнулись бы с тем, что
-го вектора мы столкнулись бы с тем, что  линейно выражается через систему
линейно выражается через систему  , то есть через подсистему системы (1). Но если какой-то вектор системы (1) линейно выражается через другие векторы этой же системы, это противоречит линейной независимости системы (1), которая по условию теоремы выполняется.
, то есть через подсистему системы (1). Но если какой-то вектор системы (1) линейно выражается через другие векторы этой же системы, это противоречит линейной независимости системы (1), которая по условию теоремы выполняется.
Следствие.Две эквивалентные системы состоят из одного и того же количества векторов.
Если и , как в теореме выше, то и  одновременно, а значит,
одновременно, а значит,  .
.
Терминология для бесконечных систем элементов.Пусть дана  (1) бесконечная система элементов линейного пространства . Система (1) называется линейно зависимой, если в ней найдётся конечная линейно зависимая подсистема. Система называется линейно независимой, если всякая её конечная подсистема линейно независима.
(1) бесконечная система элементов линейного пространства . Система (1) называется линейно зависимой, если в ней найдётся конечная линейно зависимая подсистема. Система называется линейно независимой, если всякая её конечная подсистема линейно независима.
Пример.Множество  ЛНС. Любая конечная подсистема ЛНС.
ЛНС. Любая конечная подсистема ЛНС.
Дата добавления: 2021-01-11; просмотров: 945;
Поиск по сайту
Узнать еще
- Hа pазpезе показывают то, что расположено в секущей плоскости и что pасположено за ней.
- А. Уравнения движения точки в декартовых координатах
- Автономные системы, символические уравнения Вопрос 2
- Алгебраические и трансцендентные уравнения
- Алгоритм составления уравнения химической реакции
- Амплитудная модуляция с двумя боковыми полосами.
- Анализ информации, выводимой на автоматизированные рабочие места эксплуатационного персонала
- Анализ качества эмпирического уравнения множественной

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
