Синтез линейных корректирующих устройств в нелинейных системах
Метод синтеза корректирующих устройств в нелинейных системах по показателю колебательности М базируется на той же основе, что и метод синтеза корректирующих устройств в линейных системах. Качество процесса в системе связывается с выбранной величиной показателя колебательности  , реализуемого в системе.
, реализуемого в системе.
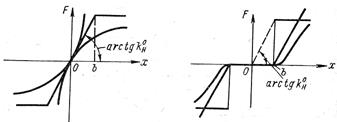
Если для исходной нелинейной системы построить запретную зону для выбранного значения и амплитудно-фазовую частотную характеристику линейной части  , то с помощью линейной коррекции следует так деформировать характеристику , чтобы ее вывести из запретной зоны (рис. 7.12, а). Аналогично для логарифмических характеристик следует деформировать логарифмическую фазовую характеристику (л. ф. х.) линейной части так, чтобы вывести ее из запретной зоны (рис. 7.12, б).
, то с помощью линейной коррекции следует так деформировать характеристику , чтобы ее вывести из запретной зоны (рис. 7.12, а). Аналогично для логарифмических характеристик следует деформировать логарифмическую фазовую характеристику (л. ф. х.) линейной части так, чтобы вывести ее из запретной зоны (рис. 7.12, б).
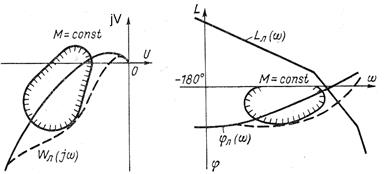
а) б)
Рис. 7.12. Деформирование л. а. х. и л. ф. х.
Синтез линейных корректирующих устройств выполняется с помощью логарифмических характеристик и включает в себя нижеследующие этапы.
1. Построение располагаемой логарифмической амплитудной характеристики (л. а. х.) приведенной линейной части. Располагаемая л. а. х. строится по исходной структурной схеме системы.
2. Построение желаемой л. а. х. приведенной линейной части системы. Желаемая л. а. х. строится по заданным требованиям на проектирование и выбранному показателю колебательности М. Как исходная линейная часть, так и линейная часть скорректированной системы считаются минимально-фазовыми (состоящими из устойчивых звеньев). Это обеспечивает однозначное соответствие друг другу л. а. х. и л. ф. х., и синтез выполняется только по логарифмическим амплитудным характеристикам.
3. Определение л. а. х. последовательного корректирующего устройства. Л. а. х. последовательного корректирующего звена получается вычитанием из л. а. х. желаемой л. а. х. располагаемой:

4. Реализация коррекции. Под реализацией коррекции понимается определение схемы корректирующего устройства и расчет ее элементов. Если оказывается целесообразным вместо последовательной коррекции применение параллельного корректирующего устройства или обратной связи, то выполняется пересчет последовательного корректирующего устройства по формулам или таблицам эквивалентного перехода, имеющимся в литературе.
5.Проверка результата выполненного синтеза. В проверку входит построение запретной зоны для л. ф. х. приведенной линейной части и построение самой л. ф. х. скорректированной системы.
Наибольшую сложность при синтезе корректирующих устройств составляет определение желаемой л. а. х.
При синтезе линейных статических систем и систем с астатизмом первого порядка рекомендуемыми желаемыми л. а. х. являются л. а. х. типов а, б, в, г (рис. 7.13). Указанные л. а. х. являются желаемыми и для линейных частей нелинейных систем.
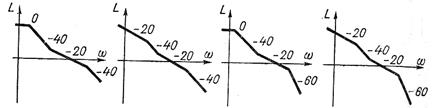
а) б) в) г)
Рис. 7.13. Желаемые л. а. х.
Рассмотрим наиболее употребительную л. а. х. типа б и запретную зону  для широко распространенных л.а.х.(рис.7.14), когда коэффициент гармонической линеаризации изменяется в пределах
для широко распространенных л.а.х.(рис.7.14), когда коэффициент гармонической линеаризации изменяется в пределах  . На рис. 7.14 также изображена штриховой линией запретная зона
. На рис. 7.14 также изображена штриховой линией запретная зона  для л. ф. х. приведенной линейной системы.
для л. ф. х. приведенной линейной системы.
В линейных системах требуемый запас по фазе обеспечивался за счет достаточной протяженности асимптоты л. а. х. с наклоном — 20 дб/дек в окрестности частоты среза  . При этом, на протяженность асимптоты с наклоном — 40 дб/дек
. При этом, на протяженность асимптоты с наклоном — 40 дб/дек
никаких ограничений не накладывалось. Здесь введены относительные частоты, где  — значение частоты при
— значение частоты при
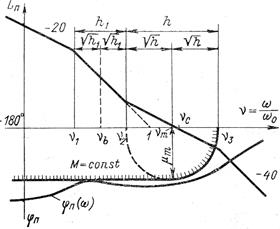
Рис. 7.14. Наиболее употребительная
л. а. х. типа б
пересечении оси частот продолжением второй асимптоты л. а. х.
В нелинейной системе, как видно на рис. 7.14, следует не только обеспечить достаточную протяженность участка h, но и наложить ограничение на протяженность участка h1.
Найдем связь между протяженностями участков h и h1 и показателем колебательности из условия незахождения л. ф. х. приведенной линейной части  в запретную зону.
в запретную зону.
Нормированное значение передаточной функции для л. а. х. будет
 , (7.15)
, (7.15)
где  — новое значение оператора;
— новое значение оператора;
 ,
,  ,
,  — относительные постоянные времени.
— относительные постоянные времени.
Протяженность участка л. а. х. с наклоном — 20 дб/дек:
 (7.16)
(7.16)
протяженность участка л. а. х. с наклоном — 40 дб/дек:
 (7.17)
(7.17)
С учетом (7.16) и (7.17) нормированную передаточную функцию (7.15)запишем в виде
 , ( 7.18)
, ( 7.18)
а соответствующая ей нормированная частотная передаточная функция при  будет
будет
 (7.19)
(7.19)
Согласно (7.19) л. ф. х. приведенной линейной части системы определится соотношением

откуда запас по фазе, соответствующий желаемой л. а. х. типа б, будет
 (7.20)
(7.20)
При достаточной протяженности участков h и h1 желаемой л. а. х. в приведенной линейной части для частот, близких к частоте среза, разность

будет величиной сравнительно малой.
При этом для определения протяженности участка h можно воспользоваться приближенным соотношением, получаемым из (7.20) без учета значения  , т. е.
, т. е.
 (7.21)
(7.21)
Согласно (7.21) выражение для запаса по фазе можно записать в виде
 (7.22)
(7.22)
Исследуя последнее выражение на максимум, получим
 (7.23)
(7.23)
при 
Это максимальный запас по фазе, обеспечиваемый за счет протяженности участка h.
Необходимый максимальный запас по фазе, определяемый запретной зоной, согласно (7.11), составляет
или
 (7.24)
(7.24)
Приравняв тангенсы для μm из (7.23) и (7.24), получим
 Откуда
Откуда

 (7.25)
(7.25)
Поскольку максимальные имеющийся и необходимый запасы по фазе приравнивались при частоте  , то участок л. а. х. с наклоном — 20 дб/дек следует располагать по возможности симметрично относительно частоты
, то участок л. а. х. с наклоном — 20 дб/дек следует располагать по возможности симметрично относительно частоты  . Деление участка h пополам относительно частоты в логарифмическом масштабе (рис. 7.14) в обычном масштабе частот означает, что
. Деление участка h пополам относительно частоты в логарифмическом масштабе (рис. 7.14) в обычном масштабе частот означает, что
Для определения протяженности участка h1 используем точную формулу для запаса по фазе (7.20). Потребуем, чтобы запас по фазе при частоте  соответствующей середине участка h1 составлял величину
соответствующей середине участка h1 составлял величину  . Тогда, согласно (7.20), получим
. Тогда, согласно (7.20), получим

или

Взяв тангенсы разностей углов, соответствующих левой и правой частям последнего равенства, получим
 (7.26)
(7.26)
Подставляя в (7.26) значение

и учитывая, что

имеем
Разрешая последнее равенство, относительно h и учитывая (7.25), окончательно получим
 (7.27)
(7.27)
Полученная формула (7.27) связывает значения протяженностей участков h и h1 с показателем колебательности М для желаемой л. а. х. приведенной линейной части типа б. Аналогично получаются и формулы, связывающие протяженности участков h и h1 с показателем колебательности М для других типовых желаемых л. а. х.:
для л. а. х. типа а:
 (7.28)
(7.28)
для л. а. х. типа б:
 (7.29)
(7.29)
для л. а. х. типа г:
 (7.30)
(7.30)
Во всех приведенных формулах протяженность участка h выбирается исходя из одного и того же приближенного условия. Для характеристик а и б, как было показано при выводе формулы для л. а. х. б, это условие обеспечивает избыток по фазе в окрестности частоты среза  и близкой к ней частоте . В случае характеристик в и г, когда последняя асимптота имеет наклон — 60 дб/дек, возможен и некоторый недостаток в запасе по фазе в окрестности частоты среза. При выборе протяженности участка h1 обеспечивается нужный запас по фазе (без избытка и недостатка) при частоте .
и близкой к ней частоте . В случае характеристик в и г, когда последняя асимптота имеет наклон — 60 дб/дек, возможен и некоторый недостаток в запасе по фазе в окрестности частоты среза. При выборе протяженности участка h1 обеспечивается нужный запас по фазе (без избытка и недостатка) при частоте .
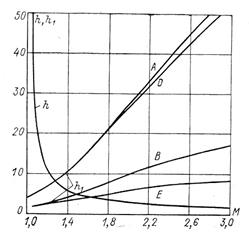
Рис. 7.15. h,  – кривые
– кривые
На рис. 7.15 представлены кривые, построенные по формулам (7.27-7.30), которые будем называть h, - кривыми. Используя h, - кривые, можно по заданному показателю колебательности  определить потребные протяженности участков h, и h1 и, следовательно, относительные частоты
определить потребные протяженности участков h, и h1 и, следовательно, относительные частоты  ,
,  ,
,  или абсолютные частоты ω1, ω2, ω3.
или абсолютные частоты ω1, ω2, ω3.
С помощью полученных h, -кривых определение желаемых л. а. х. линейной части может выполняться без всяких расчетов. При этом не обязательно выбирать h и h1 соответствующими одному значению . Часто возможны случаи, когда в интересах простоты корректирующих средств приходится при выборе протяженности участка h принимать значение показателя колебательности M1, а для участка h1 — некоторое значение M2 (обычно  ). Тогда реализуемый в системе показатель колебательности будет заключен в некоторых пределах
). Тогда реализуемый в системе показатель колебательности будет заключен в некоторых пределах  . Уточнение реализуемого значения М легко выполнить построением запретной зоны и логарифмической фазовой характеристики приведенной линейной части скорректированной системы.
. Уточнение реализуемого значения М легко выполнить построением запретной зоны и логарифмической фазовой характеристики приведенной линейной части скорректированной системы.
Кроме требований, накладываемых на протяженность участков h и h1, необходимо определить подъем желаемой л. а. х. приведенной линейной части системы, исходя из заданной точности. Оценка точности нелинейных систем и определение подъема желаемой л. а. х. связаны с видом статической нелинейности вблизи нуля.
Если статические характеристики вблизи нуля аппроксимируются линейным участком (рис. 7.16, а), то нелинейные системы к концу переходного процесса могут рассматриваться как линейные. Подъем желаемой л. а. х. в этом случае определяется, как в линейных системах, по общему коэффициенту передачи  . Причем
. Причем  определяется, как тангенс угла наклона касательной или секущей нелинейной характеристики вблизи нуля (рис. 7.16, а).
определяется, как тангенс угла наклона касательной или секущей нелинейной характеристики вблизи нуля (рис. 7.16, а).
а) б)
Рис. 7.16. Определение 
Логарифмическая амплитудная характеристика приведенной линейной части должна иметь подъем для первой асимптоты на величину  для статических систем и такой же подъем при частоте
для статических систем и такой же подъем при частоте  для первой асимптоты в системах с линейной частью, обладающей астатизмом первого порядка. Нелинейность проявляет свои особенности только при формировании среднечастотной части желаемой л. а. х.
для первой асимптоты в системах с линейной частью, обладающей астатизмом первого порядка. Нелинейность проявляет свои особенности только при формировании среднечастотной части желаемой л. а. х.
Если статические характеристики имеют зону нечувствительности (рис. 7.16, б) при любом дальнейшем продолжении, то установившаяся ошибка в основном будет определяться половиной зоны нечувствительности. Переходный равновесно сходящийся процесс может закончиться при любом значении входной величины нелинейности внутри зоны нечувствительности 2б. В этом случае коэффициент передачи нелинейного звена для определения подъема, желаемой л. а. х. рекомендуется определять методом статической линеаризации, т. е. взятием отношения ординат в области, прилегающей к зоне нечувствительности, к абсциссам нелинейной статической характеристики (рис. 7.16,б). После получения общего коэффициента передачи  подъем желаемой л. а. х. линейной части определяется по правилам линейных систем.
подъем желаемой л. а. х. линейной части определяется по правилам линейных систем.
Дата добавления: 2020-10-25; просмотров: 718;
Поиск по сайту
Узнать еще
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- PCI является стандартной шиной для подключения периферийных устройств. Среди них можно отметить сетевые карты, модемы, звуковые карты и платы захвата видео.
- А) Назначение и устройство
- А.7 Устройство и принципы действия адсорбционных аппаратов
- Аварии на объектах обустройства
- Авария – разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемые взрыв и (или) выброс опасных веществ.
- Автоматизация эвристических методов синтеза новых систем

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
