Оценка качества процессов в нелинейных системах по показателю колебательности
Поскольку запретные зоны для определения показателя колебательности М в нелинейных системах строятся при учете всех возможных относителъных амплитуд α колебаний на входе нелинейности при всех возможных частотах, то оценка качества процессов по показателю колебательности является такой же правомерной, как и в линейных системах. Приближенность оценки обусловливается приближенностью метода гармонической линеаризации.
В нелинейных системах возможны в зависимости от значений параметров системы и вида нелинейности области с равновесно сходящимися процессами, области процессов, сходящихся к автоколебаниям, и области расходящихся процессов. При оценке качества процессов важно, прежде всего, определить указанные области. Кроме того, внутри области равновесно сходящихся процессов желательно оценить качество процессов
по показателю колебательности в зависимости от значений параметров. 
По аналогии с линейными системами можно утверждать, что обеспечение любого значения показателя колебательности  соответствует устойчивому равновесно сходящемуся процессу с качеством, определяемым величиной М. Здесь остаются те же рекомендации к допустимым значениям показателя колебательности, т. е.
соответствует устойчивому равновесно сходящемуся процессу с качеством, определяемым величиной М. Здесь остаются те же рекомендации к допустимым значениям показателя колебательности, т. е.  ; иногда
; иногда  .
.
Покажем, что при  запретные зоны вырождаются в линию—z(α), совпадающую с характеристикой
запретные зоны вырождаются в линию—z(α), совпадающую с характеристикой  , используемой для определения автоколебаний с помощью критерия Найквиста. Для этого, используя уравнение окружностей (7.6), образующих запретные зоны
, используемой для определения автоколебаний с помощью критерия Найквиста. Для этого, используя уравнение окружностей (7.6), образующих запретные зоны  , будем полагать, что
, будем полагать, что  . Тогда для координат центра окружностей и радиуса получим
. Тогда для координат центра окружностей и радиуса получим


 (7.12)
(7.12)
Сравнивая полученные выражения для U0 и V0 с формулой (7.4) характеристики  , видим, что уравнениями (7.12) как раз определяется величина
, видим, что уравнениями (7.12) как раз определяется величина  в виде линии на комплексной плоскости.
в виде линии на комплексной плоскости.
Для линейных систем значению  соответствовала точка
соответствовала точка  , т. е. линия
, т. е. линия  в нелинейных системах есть обобщенный аналог точки линейных систем. Пересечение указанной линии с амплитудно-фазовой частотной характеристикой линейной части
в нелинейных системах есть обобщенный аналог точки линейных систем. Пересечение указанной линии с амплитудно-фазовой частотной характеристикой линейной части  соответствует периодическому режиму в системе (рис. 7.4).
соответствует периодическому режиму в системе (рис. 7.4).
Если же амплитудно-фазовая частотная характеристика линейной части не охватывает и не пересекает характеристику , это значит, что в системе имеет место равновесно сходящийся процесс, качество которого оценивается по запретным зонам с .
Охват характеристики характеристикой без пересечения означает неустойчивость нелинейной системы, т. е. расходимость нелинейного процесса.
В результате одним несложным построением можно оценить появление всех возможных процессов в нелинейной системе
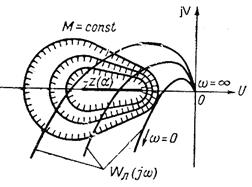
Рис. 7.4. Периодический
режим в системе
и качество равновесно сходящегося переходного процесса.
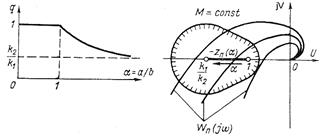
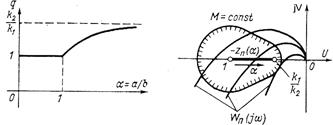
Оценим качество процессов в нелинейных системах с однозначными статическими характеристиками. Вид запретных зон  для амплитудно-фазовых характеристик на комплексной плоскости или для логарифмических фазовых характеристик на логарифмической плоскости связан в этом случае с диапазоном изменения коэффициента гармонической линеаризации
для амплитудно-фазовых характеристик на комплексной плоскости или для логарифмических фазовых характеристик на логарифмической плоскости связан в этом случае с диапазоном изменения коэффициента гармонической линеаризации  . Согласно формулам для координат центра и радиуса окружностей, образующих запретные зоны, будем иметь различные запретные зоны (рис. 7.5, а, б), соответствующие диапазону изменения коэффициента гармонической линеаризации:
. Согласно формулам для координат центра и радиуса окружностей, образующих запретные зоны, будем иметь различные запретные зоны (рис. 7.5, а, б), соответствующие диапазону изменения коэффициента гармонической линеаризации:
1 — при 
2 — при  ;
;
3 — при 
4 — при  .
.
Каждому виду запретных зон соответствуют свои нелинейные однозначные нечетно-симметричные статические характеристики.
Наиболее распространен случай 1, соответствующий, например, релейной характеристике с зоной нечувствительности (рис. 1.3), характеристике с насыщением (рис. 1.5). Запретной зоне вида 2 соответствует характеристика с переменным коэффициентом передачи (рис. 1.14).

а) б)
Рис. 7.5. Запретные зоны
Запретная зона вида 3 отвечает характеристике с переменным коэффициентом передачи, когда значение  велико, в пределе
велико, в пределе  . Запретная зона вида 4 соответствует идеальному релейному звену (рис. 1.13).
. Запретная зона вида 4 соответствует идеальному релейному звену (рис. 1.13).
Выполним оценку качества процесса в системах с нелинейностями типа 1. Полагаем, что в результате структурных преобразований система приводится к свернутой структурной схеме, содержащей приведенную линейную часть и приведенную нелинейность (рис. 7.6). Приведение линейной части и нелинейности заключается в том, что из коэффициента гармонической линеаризации нелинейности выделяется множитель kH, не зависящий от амплитуды гармонического сигнала, и передается в линейную часть (  ). Величина kH чаще берется такой, чтобы максимальное значение оставшегося приведенного коэффициента гармонической линеаризации равнялось единице. Для приведенного нелинейного звена коэффициент гармонической линеаризации
). Величина kH чаще берется такой, чтобы максимальное значение оставшегося приведенного коэффициента гармонической линеаризации равнялось единице. Для приведенного нелинейного звена коэффициент гармонической линеаризации  .
.
Положим, что в качестве нелинейности имеем релейное звено с характеристикой, обладающей зоной нечувствительности (рис. 1.3).
Для такой характеристики коэффициент гармонической линеаризации



Рис. 7.6. Приведенная
структурная схема
Представляя коэффициент гармонической линеаризации в виде
 (7.13)
(7.13)
где

 (7.14)
(7.14)
приходим к схеме, изображенной на рис. 7.7.
Приведенный коэффициент гармонической линеаризации теперь изменяется в пределах  , так как максимум функции
, так как максимум функции
 ,
,
входящей в (7.14), равен 0.5 при  .
.
Такое представление системы удобно тем, что запретные зоны образуются окружностями с абсциссой центра и радиусом
совпадающими с окружностями приведенной линейной системы (с исключенной приведенной нелинейностью), и касательными к этим окружностям, проведенными из начала координат (рис. 7.7). Это упрощает построение и позволяет сравнить линейный вариант системы с нелинейным.
Приведенная характеристика
в данном случае будет двузначной.
Из выполненного построения (рис. 7.7) следует, что в рассматриваемой релейной системе с линейной частью выше второго порядка при малых значениях коэффициента передачи  имеет место устойчивый, равновесно сходящийся процесс. Качество процесса легко оценивается по запретной зоне , касательной к характеристике
имеет место устойчивый, равновесно сходящийся процесс. Качество процесса легко оценивается по запретной зоне , касательной к характеристике  .
.
При значениях  , в системе с заданными параметрами имеется два периодических режима с одной частотой
, в системе с заданными параметрами имеется два периодических режима с одной частотой  и двумя значениями амплитуд α1п и α2п. Периодические режимы для больших амплитуд
и двумя значениями амплитуд α1п и α2п. Периодические режимы для больших амплитуд  , устойчивы, т. е. соответствуют автоколебаниям. Периодические режимы при
, устойчивы, т. е. соответствуют автоколебаниям. Периодические режимы при  соответствуют неустойчивому предельному циклу. Прохождение амплитудно-фазовой частотной характеристики через точку — 1, j0 для приведенной линейной системы
соответствуют неустойчивому предельному циклу. Прохождение амплитудно-фазовой частотной характеристики через точку — 1, j0 для приведенной линейной системы
означает границу устойчивости, а для нелинейной системы — границу, отделяющую область равновесно сходящихся процессов от области автоколебаний. Следовательно, область автоколебаний в данной системе появляется за счет области
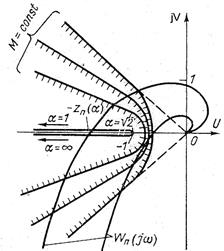
Рис. 7.7. Запретные зоны образованные
окружностями с абсциссой
центра U0 и радиусом R
неустойчивости линейной системы и значение коэффициента передачи, соответствующее границе устойчивости, равно критическому значению коэффициента передачи нелинейной системы:  .
.
Оценим процессы в нелинейной системе с нелинейным звеном, имеющим переменный коэффициент передачи (рис. 7.8, а, б).
Приближенно оценку ожидаемых процессов можно выполнить непосредственно по виду нелинейности, не вычисляя коэффициентов гармонической линеаризации.
Считаем опять систему состоящей из приведенной линейной части и приведенной нелинейности (рис. 7.6, а). Для первого случая (рис. 7.8, а), когда коэффициент усиления в системе
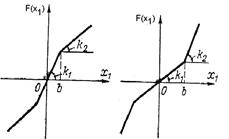
а) б)
Рис. 7.8. Нелинейная система с
переменным коэффициентом
передачи
снижается с возрастанием входной величины нелинейности, получим примерный вид графика изменения коэффициента гармонической линеаризации q в зависимости от α (рис.7.9,а).
а) б)
Рис. 7.9. График изменения
коэффициента гармонической
линеаризации
Здесь приведение заключается в передаче в линейную часть коэффициента k1.
Характеристика  в этом случае будет однозначной (рис. 7.9, б) и займет на отрицательной полуоси вещественный отрезок от - 1 до
в этом случае будет однозначной (рис. 7.9, б) и займет на отрицательной полуоси вещественный отрезок от - 1 до  при возрастании амплитуд α справа налево.
при возрастании амплитуд α справа налево.
Запретные зоны  образуются двумя окружностями и касательными к ним. Меньшая из окружностей соответствует запретной зоне приведенной линейной системы, а вторая — определяется абсциссой центра
образуются двумя окружностями и касательными к ним. Меньшая из окружностей соответствует запретной зоне приведенной линейной системы, а вторая — определяется абсциссой центра
и радиуса
 ,
,
где 
Если нанести на комплексную плоскость амплитудно-фазовые частотные характеристики приведенных линейных частей выше второго порядка (рис. 7.9, б), получим три области процессов. При малых коэффициентах передачи  это устойчивые, равновесно сходящиеся процессы с качеством, определяемым некоторым значением . При значениях коэффициента передачи приведенной линейной части
это устойчивые, равновесно сходящиеся процессы с качеством, определяемым некоторым значением . При значениях коэффициента передачи приведенной линейной части  в системе имеют место процессы, сходящиеся к автоколебаниям, частота и амплитуда которых определяется по точке пересечения характеристик
в системе имеют место процессы, сходящиеся к автоколебаниям, частота и амплитуда которых определяется по точке пересечения характеристик  и
и  .
.
Для больших значений коэффициента передачи приведенной линейной части  характеристика охватывает характеристику и, значит, в системе имеем расходящиеся нелинейные процессы.
характеристика охватывает характеристику и, значит, в системе имеем расходящиеся нелинейные процессы.
Таким образом, в зависимости от значения коэффициента передачи здесь имеем три области: область устойчивости равновесия, область автоколебаний и область неустойчивости, причем область автоколебаний занимает часть области неустойчивости приведенной линейной системы.
Оценим процессы в нелинейной системе, когда коэффициент передачи нелинейного звена возрастает с увеличением входной величины х1(рис. 7.8, б). Здесь при приведении нелинейности целесообразно сохранить  , т. е. отнести к линейной части коэффициент
, т. е. отнести к линейной части коэффициент  . Коэффициент передачи приведенной линейной части kл при малых отклонениях
. Коэффициент передачи приведенной линейной части kл при малых отклонениях  останется таким же, как и в предыдущем случае.
останется таким же, как и в предыдущем случае.
Приведенный коэффициент гармонической линеаризации с учетом принятого условия изобразится в виде графика q(α) (рис. 7.10, а) и будет изменяться в пределах

Тогда характеристика займет отрезок на оси вещественных от до — 1 (рис. 7.10, б). Возрастание амплитуд вдоль этого отрезка происходит слева направо. Это значит, что при пересечении характеристик и получим неустойчивое периодическое решение.
Запретные зоны здесь образуются большой окружностью, соответствующей приведенной линейной системе, и малой — соответствующей  .
.
а) б)
Рис. 7.10. Оценка процессов в нелинейной
системе
Построив амплитудно-фазовые частотные характеристики для приведенной линейной части при различных коэффициентах передачи  , можно сделать заключение о процессах в системе.
, можно сделать заключение о процессах в системе.
Как видим, при малых коэффициентах передачи имеем равновесно сходящиеся процессы. При значениях получим неустойчивые периодические режимы, т. е. устойчивость в малом и неустойчивость в большом. Для больших значений коэффициента передачи линейной части имеем неустойчивость в целом.
Область неустойчивых предельных циклов практически можно отнести к области неустойчивости, так как всегда найдутся начальные значения отклонений в системе, выходящие за предельный цикл. Указанная область, как видно из рис. 7.10,б, появилась за счет сужения области устойчивости приведенной линейной системы. Здесь граничный коэффициент линейной системы  , а практическая неустойчивость нелинейной системы начинается при
, а практическая неустойчивость нелинейной системы начинается при  .
.
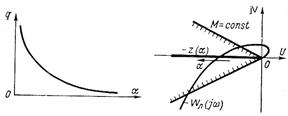
Рассмотрим систему с идеальным релейным звеном. Для такого звена имеем коэффициент гармонической линеаризации


Коэффициент гармонической линеаризации изменяется в пределах  (рис. 7.11, а). Характеристика
(рис. 7.11, а). Характеристика  занимает всю полуось вещественных от 0 до - ∞ (рис. 7.11, б) при возрастании амплитуд справа налево вдоль характеристики.
занимает всю полуось вещественных от 0 до - ∞ (рис. 7.11, б) при возрастании амплитуд справа налево вдоль характеристики.
Следовательно, при линейной части выше второго порядка получим режим автоколебаний, определяемый точкой
а) б)
Рис. 7.11. Изменение коэффициента
гармонической линеаризации
пересечения характеристик  и .
и .
Аналогично выполняется оценка качества процессов и при наличии в системе двузначных статических нелинейностей, а также динамических нелинейностей. Правда, несколько усложняется процесс построения запретных зон .
Дата добавления: 2020-10-25; просмотров: 794;
Поиск по сайту
Узнать еще
- H. Разработка мер по повышению качества работы органа здравоохранения
- II. Оценка материально-производственных запасов
- III. Единство и взаимосвязь процессов воспитания и обучения.
- IV. Степени качества наречий
- Mетодические критерии качества измерений в социальных науках
- V. Оценка состояния здоровья детей и подростков
- VII. ОБСЛЕДОВАНИЕ ПОМЕТОВ И КОНТРОЛЬ КАЧЕСТВА ИХ ВЫРАЩИВАНИЯ
- А. Наилучшая статистическая оценка

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
