Колебательные переходные процессы
Рассмотрим определение качества колебательных переходных процессов в нелинейных системах (рис. 6.19). Эти процессы могут быть затухающими до нуля или до амплитуды автоколебаний и расходящимися изнутри до амплитуды автоколебаний, или же расходящимися неограниченно в случае неустойчивости.
Будем рассматривать их как собственные колебания при отсутствии внешних воздействий во время самого процесса. Уравнение нелинейной системы (рис.4.2), как известно, имеет вид
 (6.44)
(6.44)
В линейных системах синусоидальные переходные колебания имели вид

 (6.45)
(6.45)
Для линейной системы высокого порядка такое решение является приближенным в том смысле, что оно соответствует одной паре комплексных корней характеристического уравнения системы.
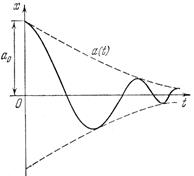
Рис. 6.19. Колебательные
переходные процессы
Чтобы это решение отвечало основной части переходного процесса, эта пара корней должна быть ближайшей к мнимой оси.
В нелинейных системах, линейная часть которых удовлетворяет свойству фильтра нижних частот (раздел 4.1), будем считать переходные колебания близкими к синусоидальным (6.45), полагая, однако, что показатель затухания ξ и частота ω медленно изменяются с изменением амплитуды колебаний α в ходе процесса. Сама амплитуда α(t) может меняться быстро вплоть до затухания за один-два периода.
Тогда решение вместо (6.45) надо искать в виде
 (6.46)
(6.46)

Как частный случай отсюда при  и
и  получается формула (6.45) для линейных систем.
получается формула (6.45) для линейных систем.
При  колебания затухают, при
колебания затухают, при  — расходятся.
— расходятся.
Гармоническая линеаризация нелинейности здесь изменится, поскольку из (6.46) имеем


Отсюда
 ,
,
В связи с этим первая гармоника колебаний на выходе нелинейности, вместо прежнего (4.10) получит выражение
 ,
,
где коэффициенты гармонической линеаризации q и q' определяются, как и раньше, формулами (4.11). Поэтому здесь для конкретных нелинейностей можно пользоваться результатами, полученными в разделе 4.2.
Затухающие или расходящиеся колебания в линейной системе соответствуют комплексным корням характеристического уравнения. Следовательно, для их определения нужно в характеристическое уравнение гармонически линеаризованной системы (вытекающее из (6.44) в (6.47))
 (6.47)
(6.47)
подставлять  , полагая, что это соответствует ближайшей к мнимой оси паре комплексных корней. В результате получим
, полагая, что это соответствует ближайшей к мнимой оси паре комплексных корней. В результате получим
 (6.48)
(6.48)
В это комплексное уравнение входят неизвестные величины ξ, ω, α. Следовательно, из этого уравнения можно найти две из них как функцию третьей:
 ξ(α)
ξ(α)
ω(α) (6.49)
Этого достаточно, чтобы затем по формулам (6.46) приблизительно определить и кривую переходных колебаний x(t).
В большинстве случаев при проектировании системы автоматического управления и регулирования не требуется вычерчивать кривую переходного процесса. Нужна лишь оценка быстроты затухания и частоты колебаний, т. е. для оценки качества переходного колебательного процесса в большинстве случаев можно ограничиться определением зависимостей ξ (α) и ω(α) из уравнения (6.48).
Один из способов определения этих зависимостей состоит в следующем. Выделив в уравнении (6.49) вещественную и мнимую части, получим два уравнения

 (6.50)
(6.50)
из которых и определяются зависимости (6.49).
Если нужно выбирать какой-либо параметр системы, например коэффициент усиления линейной части kл, так, чтобы ξ и ω удовлетворяли заданным требованиям, то можно пользоваться так называемыми диаграммами качества. Они строятся следующим образом.
Пусть в какой-либо системе мы определили зависимость амплитуды автоколебаний α п от параметра kл, как показано на рис. 6.21. Здесь по параметру kл выделена область устойчивости равновесного состояния. В автоколебательном режиме имеем  , т. е.
, т. е.  . Ниже линии АВ (рис. 6.21) колебания расходятся. Следовательно, там . Выше линии АВ колебания затухают и, значит, там . На самой линии АВ имеем .
. Ниже линии АВ (рис. 6.21) колебания расходятся. Следовательно, там . Выше линии АВ колебания затухают и, значит, там . На самой линии АВ имеем .

Рис.6.21. Зависимость
амплитуды
автоколебаний αп от
параметра kл
Если на основании уравнений (6.50) провести линии равных значений ξ, то получится диаграмма, изображенная на рис. 6.22. Взяв некоторое значение  в области устойчивости равновесия, получим (идя по вертикали) зависимость
в области устойчивости равновесия, получим (идя по вертикали) зависимость  , показанную на рис. 6.23, а.
, показанную на рис. 6.23, а.
Для значения же  в области автоколебаний (рис. 6.22) зависимость будет иметь иной вид (рис. 6.23, б).
в области автоколебаний (рис. 6.22) зависимость будет иметь иной вид (рис. 6.23, б).
Эти графики дают представление о качестве затухания колебательных переходных процессов при разных значениях параметра kл.
Можно найти огибающую переходного колебательного процесса  во всех этих случаях (рис. 6.24), согласно (6.47), по формуле
во всех этих случаях (рис. 6.24), согласно (6.47), по формуле
 (6.51)
(6.51)


а) б)
Рис.6.22. Линии равных Рис.6.23. Зависимость
значений ξ 


Рис.6.24.Огибающая переходного Рис.6.25. Линии
колебательного процесса  равных значений
равных значений
частоты ω
Интегрирование (6.51) в конечной форме возможно лишь в простейших случаях. Поэтому приведем графический способ построения огибающей . Введем в рассмотрение текущую «постоянную времени»
 (6.52)
(6.52)
В обыкновенных линейных системах  . Здесь же Т медленно изменяется с изменением амплитуды. Значения
. Здесь же Т медленно изменяется с изменением амплитуды. Значения  , согласно формуле (6.52), берутся из диаграммы качества (рис. 6.22) для каждого значения а при заданном kл. Считая на небольшом промежутке времени, производим графическое построение огибающее указанным на рис. 6.24 способом. Он настолько прост, что не требует дополнительных к рисунку разъяснений.
, согласно формуле (6.52), берутся из диаграммы качества (рис. 6.22) для каждого значения а при заданном kл. Считая на небольшом промежутке времени, производим графическое построение огибающее указанным на рис. 6.24 способом. Он настолько прост, что не требует дополнительных к рисунку разъяснений.
Для наглядного представления об изменениях частоты переходных колебаний можно, используя уравнения (6.50), на той же плоскости (kл, α), построить линии равных значений частоты ω (рис. 6.25).
Пример6.5. Построим диаграммы качества нелинейных колебательных переходных процессов для системы, показанной на рис. 6.26, где
 ;
;
 ;
;
F(x) имеет вид, приведенный на рис. 1.13.

Рис. 6.26. Пример системы для построения
диаграммы качества
Гармоническая линеаризация нелинейности дает


Характеристическое уравнение замкнутой системы в результате получает вид

Подставляя в это уравнение  , ищем решение в форме (6.47).
, ищем решение в форме (6.47).
Выделив вещественную и мнимую части, получим два уравнения (6.50) в виде




а) б)
Рис. 6.27. Диаграммы качества по параметру k1
Из второго уравнения с учетом значения q(α) находим
 (6.53)
(6.53)
а из первого
 (6.54)
(6.54)
где

По формулам (6.53) и (6.54) построены диаграммы качества нелинейных колебательных переходных процессов в виде линий  и
и  по параметру k1 на рис. 6.27 и по параметру koc — на рис. 6.28.
по параметру k1 на рис. 6.27 и по параметру koc — на рис. 6.28.
Линии  на обеих диаграммах соответствуют амплитуде автоколебаний. В области автоколебаний, как видно из диаграммы качества, например по линии FC (рис. 6.27), переходные процессы расходятся (
на обеих диаграммах соответствуют амплитуде автоколебаний. В области автоколебаний, как видно из диаграммы качества, например по линии FC (рис. 6.27), переходные процессы расходятся (  ) от состояния
) от состояния


а) б)
Рис. 6.28. Диаграммы качества по параметру koc
равновесия (  ) до амплитуды ас и затухают при больших начальных амплитудах (
) до амплитуды ас и затухают при больших начальных амплитудах (  ), например по отрезку ЕС. В области же устойчивости (см., например, отрезок DB) колебания при любых начальных амплитудах затухают ( ). Изменение частоты колебаний при этом показывают отрезки E'F' и D'B'. Левее линии
), например по отрезку ЕС. В области же устойчивости (см., например, отрезок DB) колебания при любых начальных амплитудах затухают ( ). Изменение частоты колебаний при этом показывают отрезки E'F' и D'B'. Левее линии  процессы апериодические.
процессы апериодические.

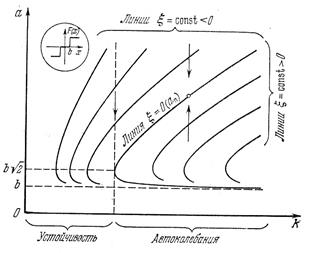
Рис. .29.Диаграммы качества для нелинейностей вида рис.1.3

Рис.6.30. Диаграммы качества
для нелинейностей вида рис.1.5
На рис. 6.29 и 6.30 приведены диаграммы качества, характерные для других видов нелинейностей. Важно отметить, что в случае нелинейной системы такие диаграммы имели бы вид вертикальных прямых, так как ξ и ω там не зависят от амплитуды. Это и видно на рис. 6.30 в зоне линейности, где  .
.
Укажем еще другой способ оценки быстроты затухания переходных процессов в нелинейной системе с одной однозначной нелинейностью F(x)(рис. 4.2). Передаточная функция линейной части имеет вид

Нелинейная характеристика F(x)расположена в секторе [0, km] (рис. 6.31)и может иметь произвольное очертание. Данный способ оценки быстроты затухания переходных процессов
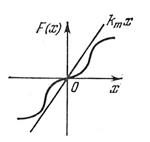
Рис 6.31. Однозначная
нелинейность
основан на применении частотного критерия абсолютной устойчивости (раздел 5.5). На комплексной плоскости вместо модифицированной (5.48) строится смещенная частотная характеристика,определяемая следующим образом:
 (6.55)
(6.55)
где


Основываясь на формулировке критерия абсолютной устойчивости (раздел 5.5), можно оценить быстроту затухания переходного процесса в системе следующим образом. Нелинейная система с устойчивой линейной частью и нелинейной характеристикой, расположенной внутри сектора [0, km], будет обладать показателем затухания, не меньшим данного  , если через точку
, если через точку  можно провести прямую с любым наклоном так, что она не пересечет смещенной характеристики
можно провести прямую с любым наклоном так, что она не пересечет смещенной характеристики  .Эта оценка проиллюстрирована на рис. 6.32.
.Эта оценка проиллюстрирована на рис. 6.32.
Можно определить предельное значение km, при котором в системе имеет место показатель затухания, не меньше ,как показано на рис. 6.33.


Рис.6.32. Прямая не Рис.6.33. Определение
пересекает смещенную предельного значения km
характеристику
Если построить серию смещенных частотных характеристик для разных значений ξ, то получим зависимость  , т. е. зависимость показателя затухания от размера сектора, в котором лежит нелинейная характеристика.
, т. е. зависимость показателя затухания от размера сектора, в котором лежит нелинейная характеристика.
6.5. Контрольные вопросы к главе 6
1. Какой вид внешнего воздействия на нелинейную систему?
2. Какая область называется областью захватывания?
3. В чем суть явления захватывания?
4. Что называется границей вибрационной помехоустойчивости системы?
5. Что такое вибрационное сглаживание нелинейности?
6. Как находится огибающая переходного колебательного процесса?
7. Можно ли, пользуясь значениями коэффициента kH, определять процесс управления в нелинейной системе на базе линейной теории?
8. Какую особенность коэффициента kH необходимо учитывать при синтезе системы с использованием линейной теории?
9. В чем суть вибрационного сглаживания при помощи автоколебаний?
10.Каково влияние автоколебательных вибрационных помех на устойчивость и качество процесса управления?
Дата добавления: 2020-10-25; просмотров: 979;
Поиск по сайту
Узнать еще
- RedOX процессы. Редоксиметрия
- V. Политропные процессы
- V. РЕЧЬ И РЕЧЕВЫЕ ПРОЦЕССЫ
- VIII.3. Антропогенные воздействия на неблагоприятные экзогенные процессы
- Автоколебательные мультивибраторы
- Автоколебательные системы с внешним воздействием, синхронизация колебаний
- Автоколебательные системы томпсоновского типа
- Активно-возбудимые среды. Автоволновые процессы в сердечной мышце

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
