Система со скользящим процессом
Проиллюстрируем понятие скользящего процесса на простом примере. Пусть задана система автоматического регулирования (рис. 2.5), уравнения динамики которой имеют вид

Рис.2.5. Система автоматического
регулирования



где  - релейная характеристика вида (рис. 1.13).
- релейная характеристика вида (рис. 1.13).
Эти уравнения можно представить в виде


 (2.7)
(2.7)
Дифференциальное уравнение фазовых траекторий:
 (2.8)
(2.8)
Линия переключения на фазовой плоскости (х, у), описывается уравнением
 (2.9)
(2.9)
Она показана на рис. 2.6. Справа от этой линии  . Поэтому уравнение фазовых траекторий (2.8) примет вид
. Поэтому уравнение фазовых траекторий (2.8) примет вид
откуда
Таким образом, фазовые траектории — это параболы, ветви которых направлены в отрицательную сторону оси х. Положение вершины параболы определяется произвольной постоянной С1, т. е. начальными условиями переходного процесса  ,
,  . Эти параболы изображены на рис. 2.6 справа от линии переключения Направление, движения изображающей точки М по параболам определяется прежним правилом (рис. 1.9).
. Эти параболы изображены на рис. 2.6 справа от линии переключения Направление, движения изображающей точки М по параболам определяется прежним правилом (рис. 1.9).
Слева от линии переключения  , а уравнение фазовых траекторий (2.8) имеет вид
, а уравнение фазовых траекторий (2.8) имеет вид

Эти параболы также изображены на рис. 2.6 слева от линии переключения. Видно, что на отрезке линии переключения АВ
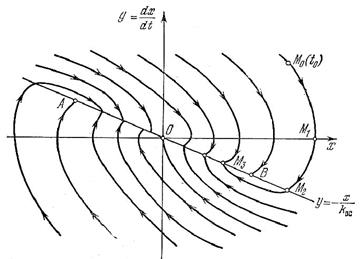
Рис.2.6. Линия переключения
на фазовой плоскости
фазовые траектории встречаются, упираясь в этот отрезок. Это можно расшифровать следующим образом. Пусть процесс идет по фазовой траектории 1 (рис. 2.7), Как только фазовая траектория пересечет линию переключения ОА, вступит в свои права фазовая траектория 2, которая вернет процесс к отрезку ОА. Но тут встретится фазовая траектория 3 и т. д. В результате изображающая точка путем вибраций около линии переключения переместится к началу координат 0.
Такой ход процесса соответствует переключениям релейного элемента (рис. 1.13) с большой частотой.
Рис.2.7. Вибрации
Теоретически частота переключения бесконечна, а амплитуда вибраций, изображенных на рис. 2.7, стремится к нулю. Следовательно, теоретически изображающая точка скользит по линии переключения к началу координат — к равновесному состоянию. Процесс такого рода называется скользящим процессом.
Найдем закон движения в скользящем процессе. На линии переключения, согласно (2.9), если учесть первое из уравнений (2.7), имеет место уравнение
 (2.10)
(2.10)
Решением этого уравнения является
где значения  и
и  считаются в момент попадания изображающей точки на линию скользящего процесса.
считаются в момент попадания изображающей точки на линию скользящего процесса.
Здесь важно отметить следующее. Нелинейная система второго порядка (2.7) на участке скользящего процесса вырождается в линейную систему первого порядка (2.10). При этом закон движения в скользящем процессе не зависит от параметров прямой цепи системы и определяется только коэффициентом обратной связи. Например, при начальном положении  (рис. 2.6) получим фазовую траекторию
(рис. 2.6) получим фазовую траекторию  , переходящую в скольжение по линии AB. Такой фазовой траектории соответствует процесс во времени x(t), изображенный на рис. 2.8, где, как и ранее, отмечены характерные точки.
, переходящую в скольжение по линии AB. Такой фазовой траектории соответствует процесс во времени x(t), изображенный на рис. 2.8, где, как и ранее, отмечены характерные точки.
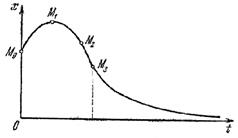
Рис.2.8. Процесс
во времени x(t)
Найдем положение концов отрезка скользящего процесса А и В на фазовой плоскости (рис. 2.6). Очевидно, что в этих точках касательные к параболам совпадают с линией переключения. Это условие, согласно (2.9), можно записать в виде
 (2.11)
(2.11)
тогда из уравнения фазовых траекторий (2.8) получим для точек А и В соответственно условие (2.11) в виде
 , следовательно
, следовательно 
 , следовательно
, следовательно 
Следовательно, отрезок скользящего процесса АB тем больше, чем больше коэффициенты усиления прямой цепи и обратной связи.
Дата добавления: 2020-10-25; просмотров: 927;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- I. Специфические особенности процесса воспитания в сравнении с процессом обучения.
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- Єдина державна система цивільної оборони населення та територій
- Ідеальна центрована оптична система

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
