Основные уравнения и основные соотношения для электроприводов с двигателями последовательного возбуждения
Электроприводы постоянного тока с двигателями последовательного возбуждения широко применялись для вспомогательных механизмов прокатных станов, для механизмов кранов (тележки, моста, подъёма), для транспортных устройств.
В настоящее время электроприводы с ДПТ ПВ удерживают свои позиции в электротяге (тяговые двигатели), в средствах внутризаводского транспорта, например, самоходные тележки, рудные и угольные самоходные вагоны и т.п. Это обусловлено тем, что в этом случае достаточно иметь только один троллей, а последовательное возбуждение – по той причине, что двигатели при этом не боятся больших снижений напряжений, лучше выдерживают перегрузки на подъёмах пути благодаря тому, что при росте тока двигателя его момент возрастает  , где
, где  .
.
Принципиальная схема включения ДПТ ПВ представлена на рис. 4.1,а, а схема модели с включением обмоток двигателя – на рис. 4.1,б.
Включение обмотки возбуждения в силовую цепь, мощность которой на два порядка выше, чем мощность возбуждения, создаёт условия для форсированного изменения потока двигателя. Анализ динамических свойств ЭМП в этом случае без учёта вихревых токов, наводящихся в полюсах и станине при быстрых изменениях потока, приводит к значительным ошибкам. В первом приближении влияние вихревых токов можно учесть добавлением короткозамкнутой обмотки с числом витков  с током
с током  и связанной с потоком Ф коэффициентом связи, равным единице (см. рис. 4.1,б).
и связанной с потоком Ф коэффициентом связи, равным единице (см. рис. 4.1,б).
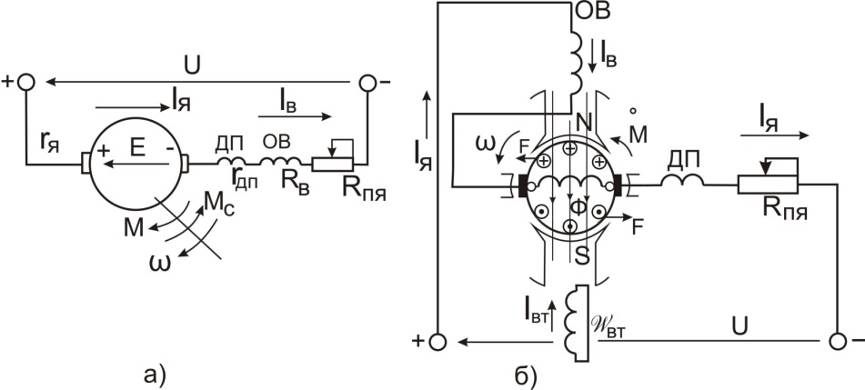
Рис. 4.1. Схема (а) и модель (б) ДПТ ПВ
Математическое описание процесса преобразования энергии в ДПТ ПВ имеет следующий вид

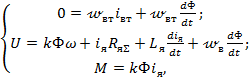 (4.1)
(4.1)
где  .
.
В статическом режиме  ,
,  имеем =0 и основные уравнения электромеханической и механической характеристик электропривода с ДПТ ПВ аналогичны таковым для ЭП с ДПТ НВ
имеем =0 и основные уравнения электромеханической и механической характеристик электропривода с ДПТ ПВ аналогичны таковым для ЭП с ДПТ НВ
 ; (4.2)
; (4.2)
 (4.3)
(4.3)
с той лишь разницей, что магнитный поток Ф является в общем случае нелинейной функцией тока  , а момент
, а момент
 . (4.4)
. (4.4)
Характеристика намагничивания Ф=  показана на рис. 4.2 (кривая 1) и свидетельствует о том, что магнитная цепь двигателя при номинальном токе якоря
показана на рис. 4.2 (кривая 1) и свидетельствует о том, что магнитная цепь двигателя при номинальном токе якоря  насыщена. В связи с этим в дальнейшем для анализа формы статических характеристик ДПТ ПВ используется аппроксимация характеристики намагничивания двумя прямыми, как это показано на рис. 4.2 (ломаная 2).
насыщена. В связи с этим в дальнейшем для анализа формы статических характеристик ДПТ ПВ используется аппроксимация характеристики намагничивания двумя прямыми, как это показано на рис. 4.2 (ломаная 2).
При  Ф
Ф  , а при
, а при  магнитный поток двигателя примерно постоянный Ф=
магнитный поток двигателя примерно постоянный Ф=  .
.
При такой аппроксимации кривой Ф  электромеханическая и механическая характеристики при различных токах якоря имеют различные выражения.
электромеханическая и механическая характеристики при различных токах якоря имеют различные выражения.
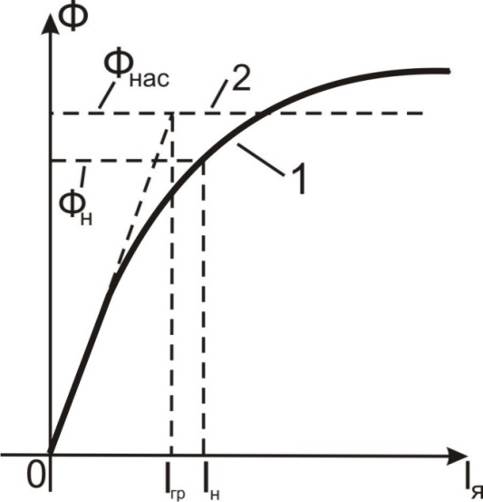
Рис. 4.2. Характеристика намагничивания Ф ДПТ ПВ
В случае  <
<  коэффициент пропорциональности
коэффициент пропорциональности  и уравнения преобразуются к виду
и уравнения преобразуются к виду
 ; (4.5)
; (4.5)
 . (4.5)
. (4.5)
При > Ф=  и те же уравнения запишутся так
и те же уравнения запишутся так
 ; (4.6)
; (4.6)
 . (4.7)
. (4.7)
На рис. 4.3 представлена механическая характеристика  для принятой аппроксимации кривой намагничивания.
для принятой аппроксимации кривой намагничивания.
Уравнения (4.4), (4.5) и рис. 4.3 показывают, что при изменении нагрузки на валу двигателя механическая и электромеханическая характеристики электропривода имеют гиперболический характер и при  асимптотически приближаются к оси ординат (
асимптотически приближаются к оси ординат (  ), а при
), а при  и
и  к прямой, параллельной оси абсцисс с
к прямой, параллельной оси абсцисс с  .
.
При > Ф= , в связи с чём механическая и электромеханическая характеристики электропривода становятся в соответствии с уравнениями (4.6), (4.7) линейными. Жёсткость механической характеристики  при < переменная и отрицательная величина, которая увеличивается с увеличением нагрузки, а при >
при < переменная и отрицательная величина, которая увеличивается с увеличением нагрузки, а при >
 .
.
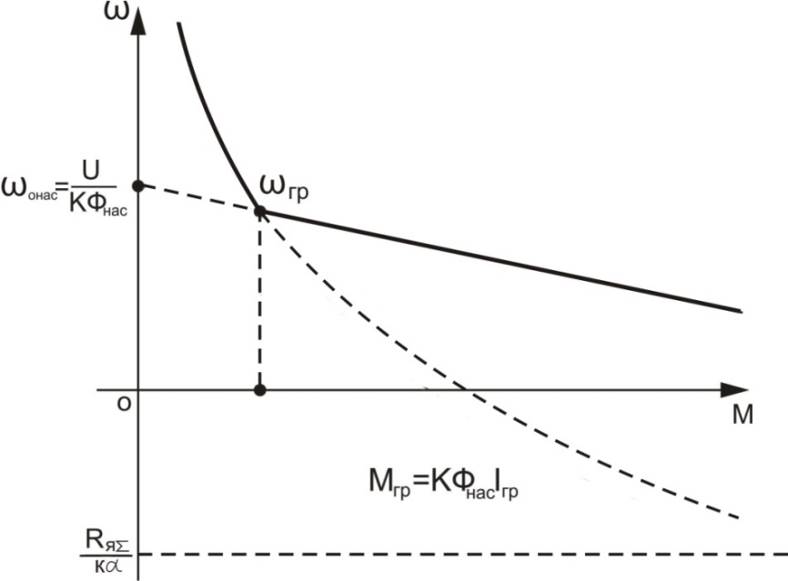
Рис. 4.3. Механические характеристики электропривода ДПТ ПВ
То обстоятельство, что при  обуславливает что и
обуславливает что и  , а ЭДС двигателя E=
, а ЭДС двигателя E=  из условия равновесия.
из условия равновесия.
В действительности в электрической машине есть остаточный магнитный поток  , который относительно мал, в связи с чем скорость идеального холостого хода двигателя ограничена
, который относительно мал, в связи с чем скорость идеального холостого хода двигателя ограничена  , однако она достигает чрезмерно больших значений, превышающих допустимую по условиям механической прочности. Поэтому при проектировании и эксплуатации электроприводов с ДПТ ПВ необходимо исключить возможность их работы с малыми нагрузками.
, однако она достигает чрезмерно больших значений, превышающих допустимую по условиям механической прочности. Поэтому при проектировании и эксплуатации электроприводов с ДПТ ПВ необходимо исключить возможность их работы с малыми нагрузками.
Естественные характеристики электропривода с ДПТ ПВ показаны на рис. 4.4. Сильная положительная связь по току, создаваемая последовательной обмоткой возбуждения, практически устраняет реакцию якоря и приводит в области допустимой перегрузки к возрастанию потока на 10-15%. Поэтому при одинаковой допустимой перегрузке по току  перегрузочная способность по моменту у электроприводов с ДПТ ПВ выше, чем у электроприводов с ДПТ НВ, и составляет
перегрузочная способность по моменту у электроприводов с ДПТ ПВ выше, чем у электроприводов с ДПТ НВ, и составляет  .
.
Электроприводам с ДПТ ПВ присуще так называемое широкое саморегулирование скорости: при снижении нагрузки против номинальной допустимая скорость увеличивается в 1,5-2 раза, при этом обеспечивается повышение производительности при данной мощности двигателя. Также важным достоинством двигателя считается повышение перегрузочной способности.
В связи с нелинейностью кривой намагничивания рассчитать естественные и искусственные характеристики электропривода с ДПТ ПВ только по его номинальным данным не представляется возможным. Для практических расчётов используют приведённые естественные характеристики  ,
,  в абсолютных единицах, например для серии двигателей Д, либо в относительных универсальных характеристиках для серии, например ДП. Методика построения естественной механической характеристики в этих случаях очень простая.
в абсолютных единицах, например для серии двигателей Д, либо в относительных универсальных характеристиках для серии, например ДП. Методика построения естественной механической характеристики в этих случаях очень простая.
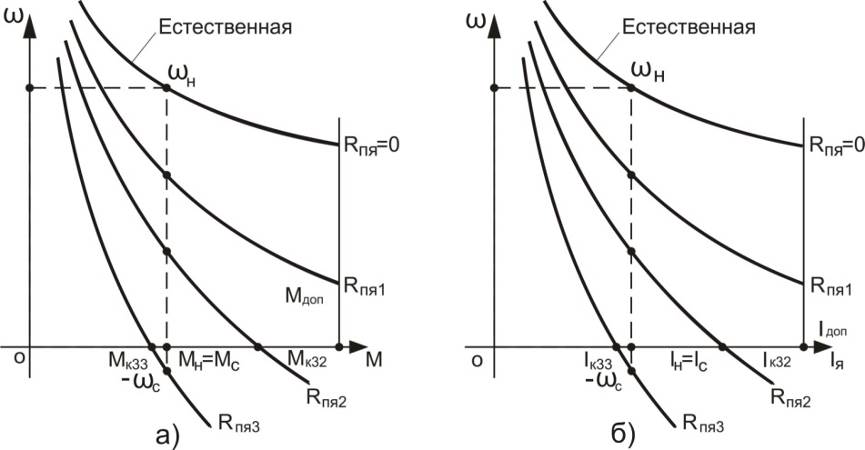
Рис. 4.4. Механические (а) и электромеханические (б) характеристики электропривода с ДПТ ПВ
По данным каталога строится скоростная  и моментная
и моментная  на одном графике (см. рис. 4.5). Задаваясь рядом значений
на одном графике (см. рис. 4.5). Задаваясь рядом значений  , находятся величины
, находятся величины  и
и  , соответствующие
, соответствующие  и строится естественная механическая характеристика
и строится естественная механическая характеристика  .
.
Реостатные характеристики и  для различных значений
для различных значений  могут быть построены графическим или графоаналитическим методами.
могут быть построены графическим или графоаналитическим методами.
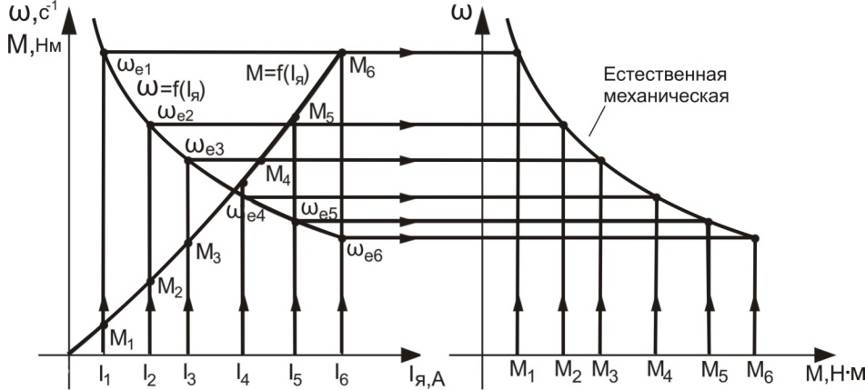
Рис. 4.5 Естественные скоростная , механическая и моментная характеристики
Графоаналитический метод построения основан на том, что при 
 на любой реостатной характеристике тоже имеет постоянное значение. Тогда
на любой реостатной характеристике тоже имеет постоянное значение. Тогда
 ;
;
и при  , исключая
, исключая  , получим
, получим
 .(4.8)
.(4.8)
Электропривод с ДПТ ПВ при постоянном напряжении может работать в тех же энергетических режимах, что и электропривод с ДПТ НВ. Режима идеального холостого хода и генераторного режима параллельно с сетью (рекуперативное торможение) получить невозможно, так как при нагрузке ,стремящейся к нулю, к нулю стремится и магнитный поток, а ось  становится асимптотой механической характеристики.
становится асимптотой механической характеристики.
Режим торможения противовключением осуществляется , как у электропривода с ДПТ НВ. При активном моменте переход в режим противовключения (точка  ) происходит при
) происходит при  >
>  или
или  >
>  (см. рис. 4.4).
(см. рис. 4.4).
При реверсе напряжения, подводимого к якорю двигателя в соответствии со схемой рис. 4.6,а, происходит торможение противовключением от  до
до  (
(  ). Если якорь двигателя не отключать от сети, он начнёт разгоняться в обратном направлении до скорости
). Если якорь двигателя не отключать от сети, он начнёт разгоняться в обратном направлении до скорости  .
.
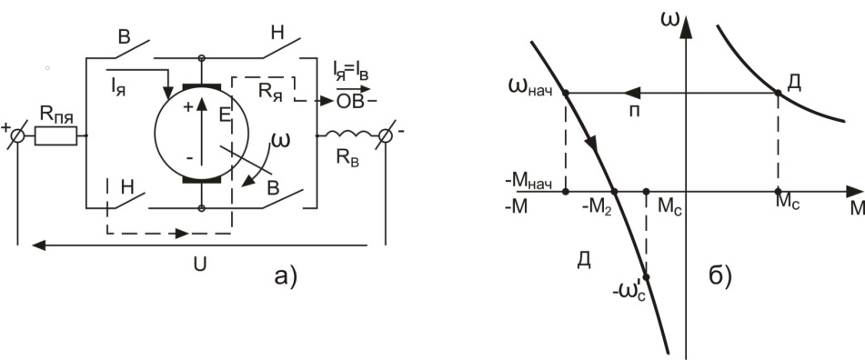
Рис. 4.6. Принципиальная электрическая схема электропривода (а) и механические характеристики (б)
Начальное значение тока при торможении в режиме противовключения  , при этом величина сопротивления
, при этом величина сопротивления  определяется по формуле
определяется по формуле
 , (4.9)
, (4.9)
а начальный момент равен
 , (4.10)
, (4.10)
где  ;
;
 - магнитный поток, соответствующий току возбуждения;
- магнитный поток, соответствующий току возбуждения;
 ,определяемый по кривой намагничивания.
,определяемый по кривой намагничивания.
Динамическое торможение электропривода с ДПТ ПВ может осуществляться по двум схемам:
а) по схеме ДПТ независимого возбуждения (рис. 4.7,а);
б) по схеме с самовозбуждением (рис. 4.7,б).
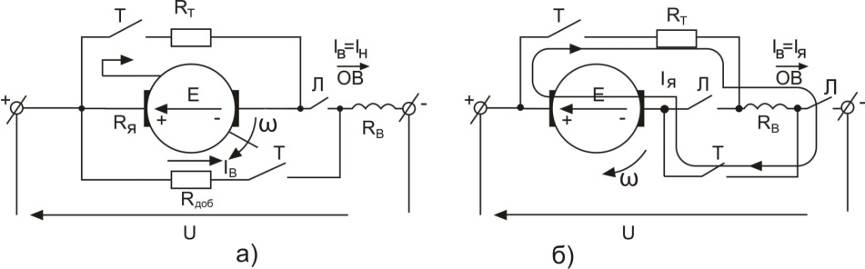
Рис. 4.7 Схемы осуществления динамического торможения электропривода с ДПТ ПВ
По схеме рис 4.7,а якорь двигателя с помощью контакта линейного контактора Л отключается от сети, а с помощью контакта контактора Т замыкается на сопротивление  . Обмотка возбуждения ОВ контактом Т через
. Обмотка возбуждения ОВ контактом Т через  подключается к сети. Величина добавочного сопротивления определяется
подключается к сети. Величина добавочного сопротивления определяется
 ,
,
т.е. цепь возбуждения потребляет из сети мощность
 ,
,
что является недостатком такого способа динамического торможения. Механические характеристики этого режима представлены на рис. 4.8, аналогичные характеристикам рис. 3.10, в.
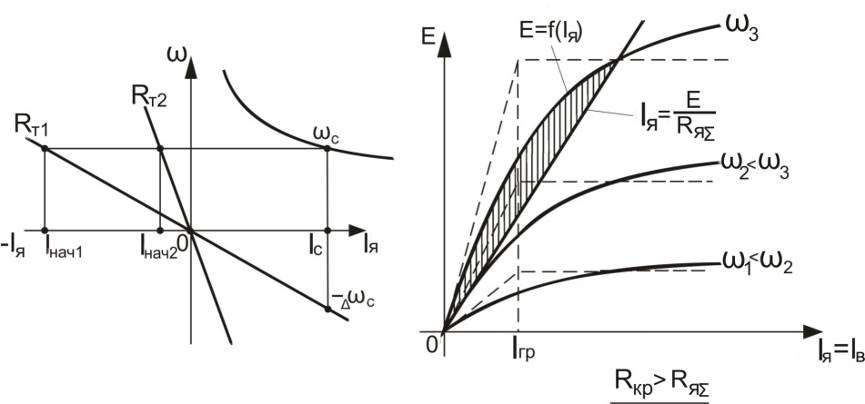
Рис. 4.8 Механические и электро- Рис. 4.9. Вольтамперные харак-
механические характеристики -теристики  ,
, 
электропривода с ДПТ ПВ по при динамическом торможении
схеме НВ (  <
<  ) с самовозбуждением
) с самовозбуждением
При динамическом торможении с самовозбуждением (рис. 4.7,б) делаются следующие переключения: контакты Л размыкаются (двигатель отключается от сети), контакты Т замыкаются – якорь двигателя, добавочный резистор  и обмотка возбуждения включаются в один контур, по которому протекает ток
и обмотка возбуждения включаются в один контур, по которому протекает ток  .
.
Так вот первым условием самовозбуждения является наличие остаточного магнитного потока  такого знака, чтобы при данном направлении вращения ЭДС, наводимая остаточным потоком, вызывала ток возбуждения, увеличивающий поток двигателя, тем самым увеличивается ЭДС, ток, поток и т.д.
такого знака, чтобы при данном направлении вращения ЭДС, наводимая остаточным потоком, вызывала ток возбуждения, увеличивающий поток двигателя, тем самым увеличивается ЭДС, ток, поток и т.д.
Второе условие самовозбуждения поясняет рис. 4.9. Здесь приведён ряд зависимостей , соответствующих различной скорости вращения якоря  . Используя кусочно-линейную аппроксимацию кривой намагничивания, показанной на рис. 4.2, зависимости приближённо линеаризуются, причём при
. Используя кусочно-линейную аппроксимацию кривой намагничивания, показанной на рис. 4.2, зависимости приближённо линеаризуются, причём при  >>
>>  ЭДС принимается постоянной. На рис. 4.9 показана также прямая
ЭДС принимается постоянной. На рис. 4.9 показана также прямая
 .
.
Известно также, что при самовозбуждении  , и второе условие самовозбуждения графически выражается наличием точки пересечения этих характеристик. Это условие на рис. 4.9 выполняется только при
, и второе условие самовозбуждения графически выражается наличием точки пересечения этих характеристик. Это условие на рис. 4.9 выполняется только при  >
>  , причём граничное значении скорости
, причём граничное значении скорости  . Таким образом, самовозбуждение может наступить только после достижения скорости
. Таким образом, самовозбуждение может наступить только после достижения скорости  , при которой наклон линейной части характеристики совпадает с наклоном прямой
, при которой наклон линейной части характеристики совпадает с наклоном прямой  . Следовательно, при увеличении сопротивления якорной цепи
. Следовательно, при увеличении сопротивления якорной цепи  самовозбуждение наступает при более высоких скоростях
самовозбуждение наступает при более высоких скоростях  . Изложенное позволяет определить форму характеристик динамического торможения, показанных на рис. 4.10.
. Изложенное позволяет определить форму характеристик динамического торможения, показанных на рис. 4.10.
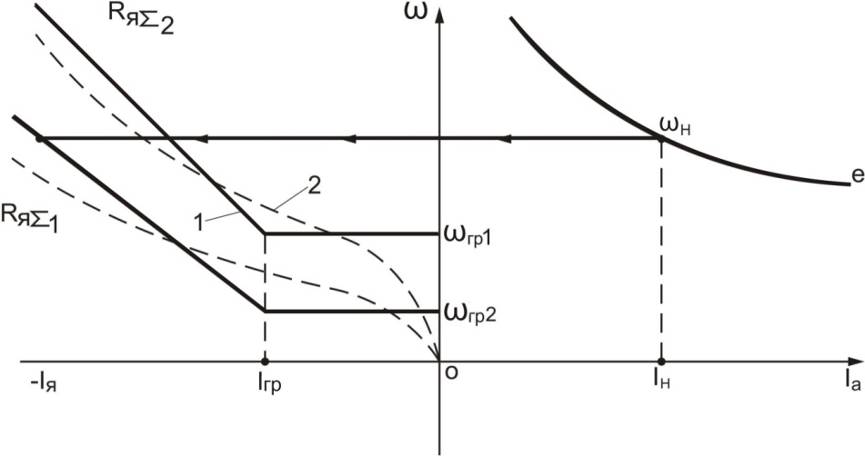
Рис. 4.10. Электромеханические характеристики ДТ с самовозбуждением (  <
<  )
)
При  самовозбуждение отсутствует и
самовозбуждение отсутствует и  (Ф=0, М=0). При
(Ф=0, М=0). При  двигатель самовозбуждается, ток якоря при принятой аппроксимации возрастает до
двигатель самовозбуждается, ток якоря при принятой аппроксимации возрастает до  и при дальнейшем увеличении скорости двигатель имеет линейную характеристику
и при дальнейшем увеличении скорости двигатель имеет линейную характеристику  , соответствующую
, соответствующую  =
=  . Поэтому электромеханическая характеристика при аппроксимации имеет вид ломанной.
. Поэтому электромеханическая характеристика при аппроксимации имеет вид ломанной.
С учётом  ток
ток  при отклоняется от ломаной, а реальная форма кривой намагничивания Ф=
при отклоняется от ломаной, а реальная форма кривой намагничивания Ф=  приводит к дополнительным отклонениям характеристики от приближённой кривой.
приводит к дополнительным отклонениям характеристики от приближённой кривой.
Динамическое торможение с самовозбуждением электроприводов с ДПТ ПВ применяется в подъёмно-транспортной технике как аварийное для предварительного снижения скорости до с последующим наложением механического тормоза.
4.2. Особенности статических режимов и характеристик электроприводов с двигателями постоянного тока смешанного возбуждения (ДПТ СВ)
В электроприводах постоянного тока иногда находят применение двигатели смешанного возбуждения, имеющие две обмотки возбуждения, одна из которых включена последовательно в якорную цепь (ОВП), а другая имеет независимое питание (ОВН) и включается по схеме рис. 4.11,а.
Соответственно магнитный поток двигателя определяется постоянной МДС обмотки независимого возбуждения и пропорциональной току якоря МДС обмотки последовательного возбуждения
или при известном числе витков обмоток
 .
.
При токе якоря 
 .
.
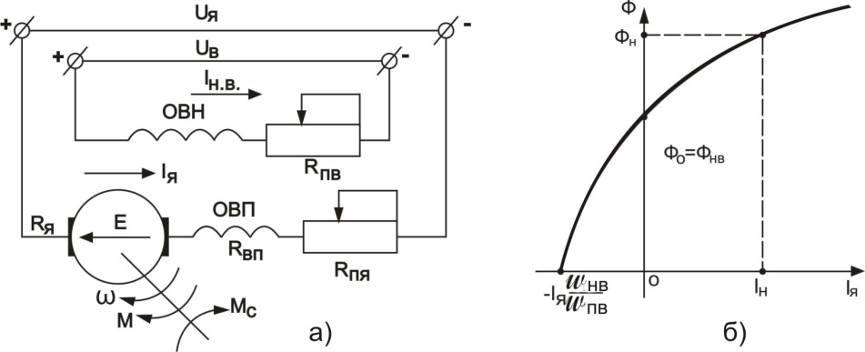
Рис. 4.11. Схема включения (а) и характеристика намагничивания двигателя смешанного возбуждения (б)
Чтобы размагнитить двигатель (Ф=0), необходимо изменить направление тока возбуждения в обмотке ОВП
 .
.
Тогда характеристика намагничивания Ф= будет иметь вид, показанный на рис. 4.11,б.
Вид механической характеристики электропривода существенно зависит от выбора значения МДС при  , так как соответствующее значение магнитного потока
, так как соответствующее значение магнитного потока  определяет скорость идеального холостого хода на естественной характеристике двигателя
определяет скорость идеального холостого хода на естественной характеристике двигателя
 .
.
Чем больше значение  ,тем ближе по свойствам двигатель смешанного возбуждения к свойствам двигателя независимого возбуждения. Как правило, обмотка независимого возбуждения двигателя рассчитывается на значение МДС, обеспечивающее поток
,тем ближе по свойствам двигатель смешанного возбуждения к свойствам двигателя независимого возбуждения. Как правило, обмотка независимого возбуждения двигателя рассчитывается на значение МДС, обеспечивающее поток  . При этом скорость идеального холостого хода составит
. При этом скорость идеального холостого хода составит
 . (4.11)
. (4.11)
Уравнение электромеханической и механической характеристик совпадают с соответствующими уравнениями для двигателя последовательного возбуждения
 ;
;
 .
.
Форма статических характеристик  ,
,  в этом случае определяется, представленной на рис. 4.11,б кривой
в этом случае определяется, представленной на рис. 4.11,б кривой  . Сравнивая эту кривую с представленной на рис. 4.2, можно установить, что добавление МДС
. Сравнивая эту кривую с представленной на рис. 4.2, можно установить, что добавление МДС  смещает кривую
смещает кривую  по оси абсцисс на отрезок
по оси абсцисс на отрезок  . Соответственно естественная электромеханическая характеристика ДПТ СВ повторяет форму характеристики ДПТ ПВ, если ось ординат сместить на значение этого тока влево от оси ординат.
. Соответственно естественная электромеханическая характеристика ДПТ СВ повторяет форму характеристики ДПТ ПВ, если ось ординат сместить на значение этого тока влево от оси ординат.
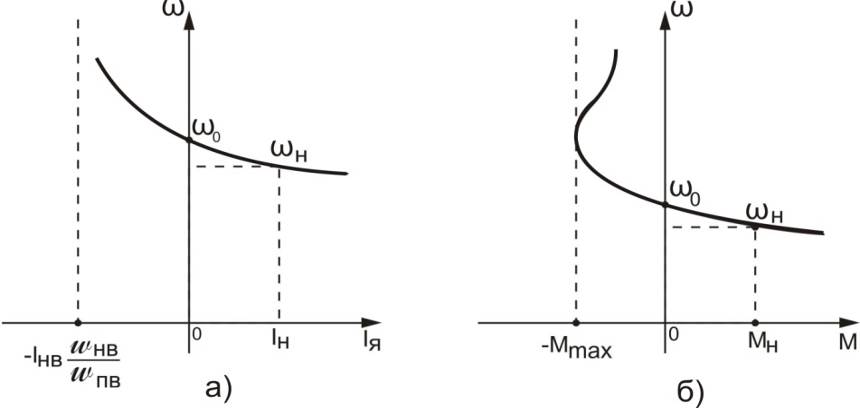
Рис. 4.12. Статические естественные характеристики ЭП с ДПТ СВ
При токе  ,
,  и при изменении нагрузки в двигательном режиме от 0 до
и при изменении нагрузки в двигательном режиме от 0 до  скорость изменяется в более широких пределах, чем у двигателей независимого возбуждения. При переводе двигателя в режим рекуперативного торможения изменение знака МДС обмотки последовательного возбуждения приводит к быстрому снижению потока (рис. 4.11,б), который при
скорость изменяется в более широких пределах, чем у двигателей независимого возбуждения. При переводе двигателя в режим рекуперативного торможения изменение знака МДС обмотки последовательного возбуждения приводит к быстрому снижению потока (рис. 4.11,б), который при  становится равным нулю. Этому значению тока якоря соответствует новая асимптота, к которой стремится
становится равным нулю. Этому значению тока якоря соответствует новая асимптота, к которой стремится  .
.
Естественная механическая характеристика  (рис. 4.12,б) по форме отличается от электромеханической характеристики. Так как при
(рис. 4.12,б) по форме отличается от электромеханической характеристики. Так как при  поток стремится к нулю, зависимость
поток стремится к нулю, зависимость  в генераторном режиме имеет максимум и при дальнейшем возрастании скорости асимптотически приближается к оси ординат слева. Эффективность рекуперативного торможения из-за размагничивающего действия последовательной обмотки возбуждения существенно снижается. В связи с этим при переводе электропривода с ДПТ СВ последовательная обмотка отключается и торможение происходит также, как у двигателей независимого возбуждения.
в генераторном режиме имеет максимум и при дальнейшем возрастании скорости асимптотически приближается к оси ординат слева. Эффективность рекуперативного торможения из-за размагничивающего действия последовательной обмотки возбуждения существенно снижается. В связи с этим при переводе электропривода с ДПТ СВ последовательная обмотка отключается и торможение происходит также, как у двигателей независимого возбуждения.
Торможение противовключением осуществляется по схеме двигателя независимого возбуждения с отключением последовательной обмотки.
Динамическое торможение производится, как правило, по схеме двигателя независимого возбуждения, в аварийных случаях по схеме с самовозбуждением.
Таким образом, характеристики электропривода с ДПТ СВ занимают промежуточное положение между характеристиками электроприводов с ДПТ НВ и ДПТ ПВ.
Дата добавления: 2019-02-08; просмотров: 1166;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Языкознание и его основные разделы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
