Искусственные статические характеристики электропривода с ДПТ НВ
Для управления работой двигателя (пуск, торможение, регулирование скорости) осуществляются необходимые изменения параметров и воздействий, определяющих его механические и электромеханические характеристики. В соответствии с (3.12) и (3.13) такими параметрами и воздействиями являются: суммарное сопротивление якорной цепи  , магнитный поток
, магнитный поток  , приложенное к якорной цепи напряжение
, приложенное к якорной цепи напряжение  . Характеристики, соответствующие изменяемым параметрам двигателя или специальным схемам его включения , называются искусственными.
. Характеристики, соответствующие изменяемым параметрам двигателя или специальным схемам его включения , называются искусственными.
Характеристики, полученные путём изменения  (введение добавочных сопротивлений
(введение добавочных сопротивлений  ), называются реостатными характеристиками электропривода ( см. рис. 3.6 ). При этом суммарное сопротивление якорной цепи увеличивается, ограничивается ток короткого замыкания
), называются реостатными характеристиками электропривода ( см. рис. 3.6 ). При этом суммарное сопротивление якорной цепи увеличивается, ограничивается ток короткого замыкания  ,уменьшается модуль жёсткости статической характеристики
,уменьшается модуль жёсткости статической характеристики  , скорость идеального холостого хода не изменяется
, скорость идеального холостого хода не изменяется  , между током и моментом, если не учитывать реакции якоря, сохраняется пропорциональность
, между током и моментом, если не учитывать реакции якоря, сохраняется пропорциональность
 ,
,
а механические и электромеханические характеристики отличаются друг от друга только масштабом по оси абсцисс (рис. 3.6,б).
Введение резисторов в якорную цепь двигателя является наиболее простейшим способом регулирования скорости электропривода, ограничения тока (момента) короткого замыкания двигателя, позволяет осуществить реостатный пуск. Характеристика с суммарным сопротивлением  даёт возможность определить сопротивления на различных реостатных характеристиках графическим способом
даёт возможность определить сопротивления на различных реостатных характеристиках графическим способом
 ,
,  ,
,  ,
,  .
.
Искусственные характеристики  ,
,  при ослаблении магнитного потока Ф путём уменьшения тока возбуждения двигателя
при ослаблении магнитного потока Ф путём уменьшения тока возбуждения двигателя  <
<  при
при  ,
,  =0 представлены на рис. 3.7, причём электромеханические и механические характеристики отличаются друг от друга, т.к. пропорциональность между током и потоком нарушается
=0 представлены на рис. 3.7, причём электромеханические и механические характеристики отличаются друг от друга, т.к. пропорциональность между током и потоком нарушается
 ;
;
 ,
,
т.е. при уменьшении Ф при одном и том же значении  момент короткого замыкания снижается. Модуль жёсткости
момент короткого замыкания снижается. Модуль жёсткости  уменьшается, статизм увеличивается.
уменьшается, статизм увеличивается.
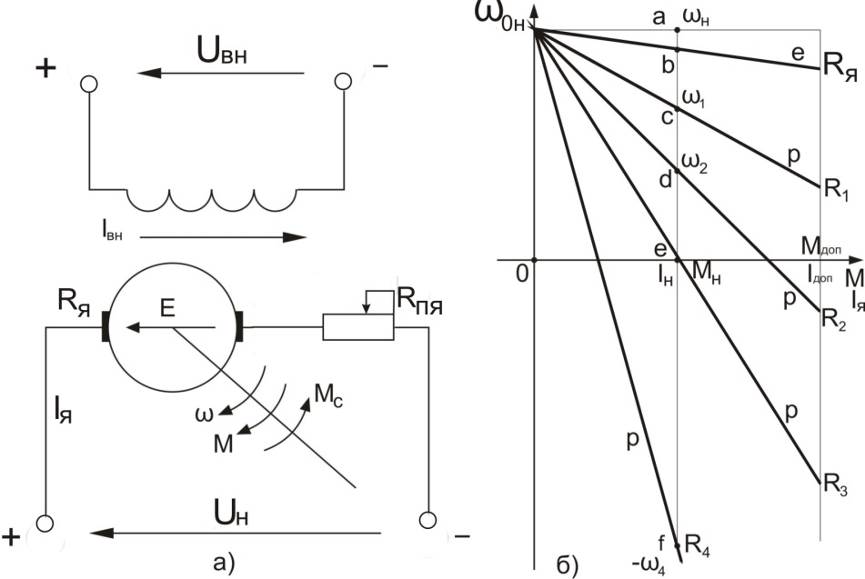
Рис. 3.6 Схема электропривода (а) и реостатные характеристики ,  (б)
(б)
Изменение напряжения, подведённого к якорю двигателя при номинальном потоке  , является в регулируемом электроприводе основным управляющим воздействием. Как правило, изменение напряжения
, является в регулируемом электроприводе основным управляющим воздействием. Как правило, изменение напряжения  возможно только в сторону уменьшения от
возможно только в сторону уменьшения от  , причём для мощных двигателей это ограничение является жёстким из-за ухудшения коммутации при напряжении
, причём для мощных двигателей это ограничение является жёстким из-за ухудшения коммутации при напряжении  > .
> .
Как следует из уравнения
 ,
,
при изменении напряжения пропорционально изменяется скорость идеального холостого хода  , а модуль статической жёсткости
, а модуль статической жёсткости  при любых напряжениях одинаков, поэтому механические характеристики имеют вид параллельных прямых на рис. 3.8.
при любых напряжениях одинаков, поэтому механические характеристики имеют вид параллельных прямых на рис. 3.8.
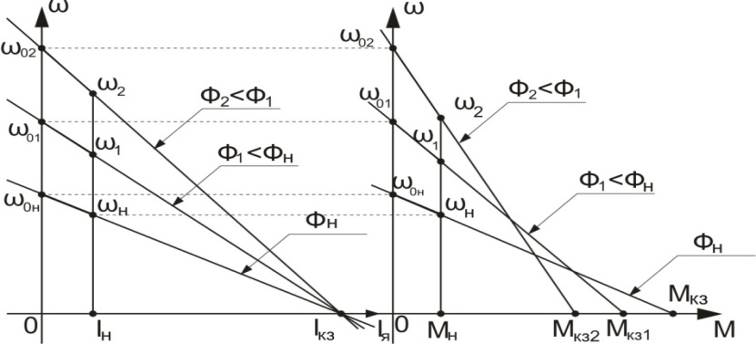
Рис. 3.7. Электромеханические и механические характеристики при  , , =0
, , =0
В отличие от ослабления поля, изменение напряжения позволяет не только изменять скорость, но и ограничивать ток короткого замыкания  . Плавное изменение напряжения на якоре от 0 до обеспечивает плавность пуска двигателей.
. Плавное изменение напряжения на якоре от 0 до обеспечивает плавность пуска двигателей.
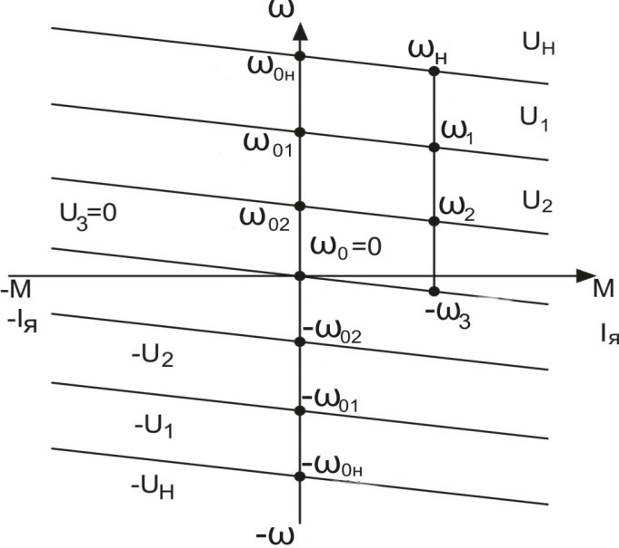
Рис. 3.8 Электромеханические и механические характеристики
при различных напряжениях
Дата добавления: 2019-02-08; просмотров: 909;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Активная мощность и угловые характеристики генератора
- Акустические характеристики устной речи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
