Принцип действия асинхронного электропривода. Схемы включения
Электроприводы с асинхронными двигателями получили в промышленности весьма широкое распространение благодаря ряду существенных преимуществ по сравнению с другими типами двигателей.
Асинхронный двигатель прост и надёжен в эксплуатации, так как не имеет коллектора; требует для изготовления меньше цветных и чёрных металлов, что делает его самым дешёвым двигателем; значительно легче других двигателей, т.е. обладает меньшим моментом инерции при одной и той же мощности, а значит, более быстродействующий. Различают два исполнения асинхронных двигателей – с короткозамкнутым ротором и фазным ротором ( см. рис. 5.1).
Принцип действия асинхронной машины в общем случае состоит в том, что неподвижная часть (статор) с расположенной на нём обмоткой служит для создания движущегося с определённой скоростью магнитного поля, а во вращающейся части (роторе) в пассивных замкнутых проводниках наводятся ЭДС, вызывающие протекание токов и образование сил (моментов) при их взаимодействии с потоком. Всё это имеет место только при несинхронном - асинхронным движением ротора относительно поля, что и определяет название асинхронная машина.
В трёхфазном асинхронном двигателе в пазах статора расположены три фазных обмотки. A-X, B-Y, C-Z, сдвинутые в пространстве на 120˚ ( см. рис. 5.1 и 5.2).
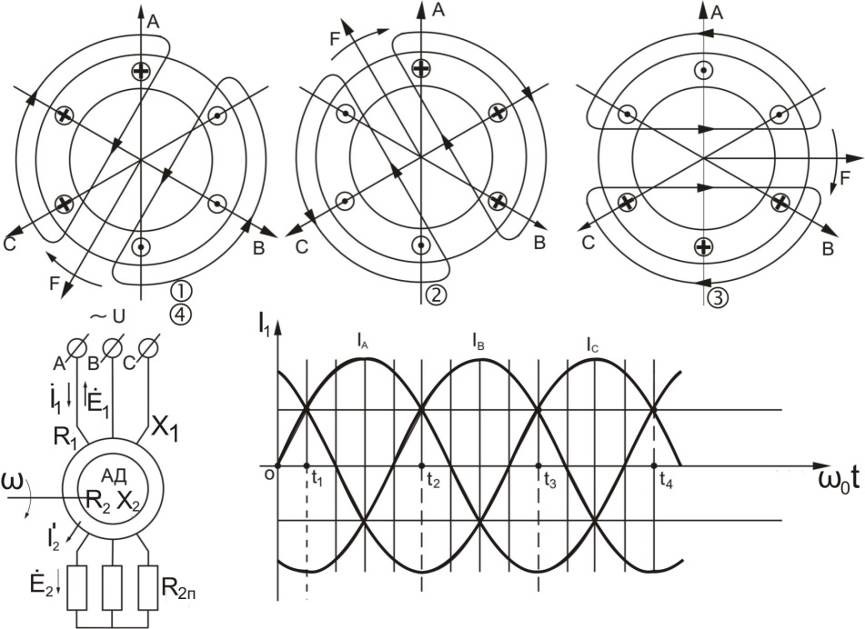
Рис. 5.1. Схема включения АД и принцип получения вращающегося магнитного поля статора
По обмоткам протекают синусоидальные токи
 (5.1)
(5.1)
где  - амплитудное значение тока статора;
- амплитудное значение тока статора;
 - электрическая угловая частота напряжения питания;
- электрическая угловая частота напряжения питания;
 - частота питающего напряжения, Гц.
- частота питающего напряжения, Гц.
Ротор асинхронного двигателя выполняется в двух вариантах: «беличья клетка» (короткозамкнутый ротор) в виде стержней, уложенных в пазы, и заваренных кольцами по торцам; либо с фазной обмоткой, концы которой выведены на кольца, расположенные на валу, и с помощью скользящих по ним щёток могут быть замкнуты на внешние резисторы или другие цепи.
При протекании токов по фазным обмоткам статора создаётся магнитное поле, вектор МДС  которого вращается (см. рис. 5.1) в пространстве в общем случае со скоростью
которого вращается (см. рис. 5.1) в пространстве в общем случае со скоростью
 , (1/с), (5.2)
, (1/с), (5.2)
где p – число пар полюсов (p=1,2,3…), т.е. скорость поля статора отличается от угловой частоты питающего напряжения и составляет  .
.
Для частоты вращения  , (об/мин), будет иметь
, (об/мин), будет иметь
 , об/мин, (5.3)
, об/мин, (5.3)
т.е. при питании от сети  =50Гц синхронная частота вращения может быть
=50Гц синхронная частота вращения может быть  =3000, 1500, 1000, 750… об /мин.
=3000, 1500, 1000, 750… об /мин.
Выражения (5.2), (5.3) имеют принципиальный характер: они показывают, что для данного двигателя имеется лишь одна возможность изменить скорость поля – изменить частоту источника питания .
Вращающийся магнитный поток статора Ф при скорости ротора  наводит в проводниках обмотки ротора ЭДС
наводит в проводниках обмотки ротора ЭДС  , под действием которой в них протекает ток
, под действием которой в них протекает ток  . Взаимодействие тока ротора с магнитным потоком определяет электромагнитный момент двигателя
. Взаимодействие тока ротора с магнитным потоком определяет электромагнитный момент двигателя
 , (5.4)
, (5.4)
где k – коэффициент пропорциональности;
 - активная составляющая тока ротора;
- активная составляющая тока ротора;
 - угол между векторами и
- угол между векторами и  .
.
Рис. 5.2. Схемы включения обмоток и векторная диаграмма приведенного асинхронного двигателя
Рассмотрим вначале физические процессы в асинхронном электроприводе при  , когда проводники обмотки ротора двигателя не пересекают силовых линий магнитного потока. В этом случае обмотку статора можно представить как идеальную катушку (
, когда проводники обмотки ротора двигателя не пересекают силовых линий магнитного потока. В этом случае обмотку статора можно представить как идеальную катушку (  ), к которой приложено переменное напряжение
), к которой приложено переменное напряжение  .
.
Приложенное напряжение  уравновесится
уравновесится  (рис. 5.3,а, б)
(рис. 5.3,а, б)
 , (5.5)
, (5.5)
где  - число витков обмотки статора;
- число витков обмотки статора;
 -коэффициент, зависящий от конкретного выполнения обмотки.
-коэффициент, зависящий от конкретного выполнения обмотки.
Тогда магнитный поток статора определяется приложенным напряжением  , частотой и параметрами обмотки
, частотой и параметрами обмотки
 ~
~  . (5.6)
. (5.6)
Ток в обмотке (фазе) статора – ток намагничивания - определяется при этом магнитным потоком и характеристикой намагничивания машины (рис. 5.3,в).
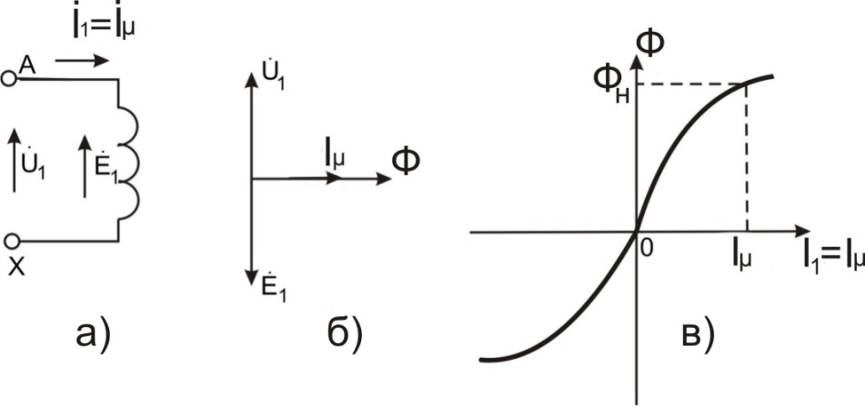
Рис. 5.3. Модель асинхронной машины при (а), векторная диаграмма (б) и кривая намагничивания (в)
В серийных двигателях 4А, 4МТ, 4МТК при  ,
,  , т.е. при номинальном магнитном потоке, ток холостого хода составляет 30-70% от номинального тока
, т.е. при номинальном магнитном потоке, ток холостого хода составляет 30-70% от номинального тока  .
.
Под нагрузкой двигателя  отличие скоростей
отличие скоростей  и
и  принято оценивать так называемым скольжением
принято оценивать так называемым скольжением
 . (5.7)
. (5.7)
В роторной обмотке (фазной обмотке для двигателей с фазным ротором, в стержнях обмотки короткозамкнутого двигателя) наводится ЭДС
 , (5.7)
, (5.7)
в которой штрихом здесь и далее отмечены приведённые величины, учитывающие неодинаковость обмоток статора и ротора. При выполнении расчётов обычно роторная обмотка «приводится» к статору так, чтобы числа их витков были одинаковы. Операция приведения не должна отражаться на работе статора, для чего необходимо и достаточно, чтобы МДС и главный поток, связывающий статорную и роторную обмотки, в результате приведения остался без изменения, т.е. выполнялось бы равенство
 , (5.8)
, (5.8)
откуда
 , (5.9)
, (5.9)
где  коэффициент трансформации;
коэффициент трансформации;
 - ЭДС обмотки неподвижного ротора (
- ЭДС обмотки неподвижного ротора (  ,
,  ).
).
Если обозначить значения активного и индуктивного сопротивлений роторной обмотки через  и
и  , то их приведённые к статору значения определятся как
, то их приведённые к статору значения определятся как
 ;
;  . (5.10)
. (5.10)
Частота наведенной ЭДС в роторной обмотке составит
 . (5.11)
. (5.11)
Ток  в роторной цепи, обладающий активным сопротивлением
в роторной цепи, обладающий активным сопротивлением  и индуктивностью
и индуктивностью  , определится по формуле
, определится по формуле
 ,
,
или с учётом (5.7) и (5.11)
 , (5.12)
, (5.12)
где  - индуктивное сопротивление рассеяния при частоте
- индуктивное сопротивление рассеяния при частоте  .
.
Полученные уравнения соответствуют традиционной схеме замещения фазы асинхронного двигателя, в которой учтены и параметры статорной обмотки  ,
,  .
.

Рис. 5.4. Схема замещения фазы асинхронного двигателя
Дата добавления: 2019-02-08; просмотров: 1033;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IP (Internet Protocol) – протокол межсетевого взаимодействия
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
