Статические электромеханические и механические характеристики асинхронного электропривода
Для качественной оценки электромеханических свойств асинхронного электропривода и количественных расчётов необходимо упростить схему замещения фазы АД (рис. 5.4) путём вынесения контура намагничивания на зажимы статора, тем самым пренебрегая влиянием параметров обмотки статора  ,
,  на магнитный поток (рис. 5.5).
на магнитный поток (рис. 5.5).
Принятая Г-образная схема замещения асинхронного двигателя справедлива при следующих допущениях:
а) параметры всех цепей двигателя постоянны, т.е.  не зависит от частоты и явления вытеснения тока в роторе, а насыщение магнитной системы не влияет на реактивные сопротивления
не зависит от частоты и явления вытеснения тока в роторе, а насыщение магнитной системы не влияет на реактивные сопротивления  и
и  ;
;
б) полная проводимость намагничивающего контура (сопротивление  и
и  ) неизменна, а намагничивающий ток не зависит от нагрузки (тока
) неизменна, а намагничивающий ток не зависит от нагрузки (тока  ) и всегда пропорционален приложенному напряжению;
) и всегда пропорционален приложенному напряжению;
в) не учитываются добавочные потери и паразитные моменты, создаваемые высшими гармониками МДС и токов двигателя.
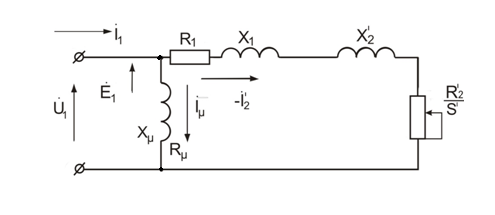
Рис. 5.5. Упрощённая схема замещения асинхронной машины
Уравнение механической характеристики  получим, приравняв потери в роторной цепи, выраженные через механические и электрические величины.
получим, приравняв потери в роторной цепи, выраженные через механические и электрические величины.
Энергетическая диаграмма асинхронной машины в двигательном режиме представлена рис.5.6
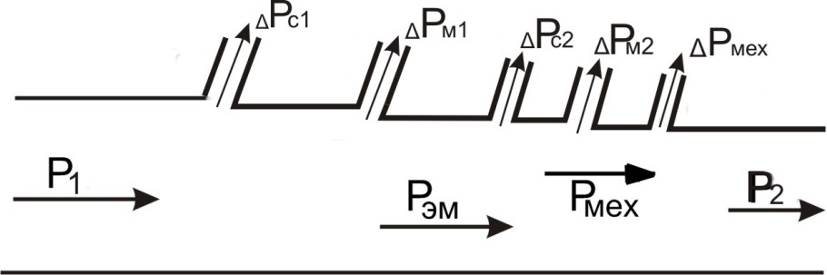
Рис. 5.6. Энергетическая диаграмма асинхронной машины в двигательном режиме
Мощность, потребляемая двигателем из сети, если пренебречь потерями в стали статора  и потерями в меди статора
и потерями в меди статора  , примерно равна электромагнитной мощности
, примерно равна электромагнитной мощности
 , (5.13)
, (5.13)
где M - электромагнитный момент, а мощность на валу при пренебрежении потерями  ,
,  определится как
определится как
 . (5.14)
. (5.14)
Тогда потери в роторной цепи
 . (5.15)
. (5.15)
С другой стороны при выражении этих потерь через электрические величины, получим
 , (5.16)
, (5.16)
откуда
 . (5.17)
. (5.17)
Из (5.17) следует, что для определения зависимости  асинхронного двигателя необходимо знать зависимость
асинхронного двигателя необходимо знать зависимость  .
.
В соответствии со схемой замещения (рис. 5.5) ток ротора найдётся по формуле
 (5.18)
(5.18)
где  - фазное значение напряжения обмотки статора;
- фазное значение напряжения обмотки статора;
 - индуктивное фазное сопротивление короткого замыкания.
- индуктивное фазное сопротивление короткого замыкания.
Подстановка (5.18) в (5.17) даёт уравнение механической характеристики
 . (5.19)
. (5.19)
Анализ этого уравнения показывает, что зависимость имеет максимум, так как при скольжении  ,
, 
 . Максимальное значение момента
. Максимальное значение момента  называется критическим. Соответствующее ему скольжение (
называется критическим. Соответствующее ему скольжение (  ) также называется критическим. Согласно общему правилу нахождения экстремума функции, необходимо определить производную
) также называется критическим. Согласно общему правилу нахождения экстремума функции, необходимо определить производную  уравнения (5.19), приравнять её к нулю и определить критическое скольжение
уравнения (5.19), приравнять её к нулю и определить критическое скольжение
 . (5.20)
. (5.20)
Подставляя в (5.19), находим
 . (5.21)
. (5.21)
Знаки (  ) в (5.20) означают, что максимум момента может иметь место при
) в (5.20) означают, что максимум момента может иметь место при  в двигательном режиме и при
в двигательном режиме и при  в генераторном режиме. Знак плюс в (5.21) соответствует
в генераторном режиме. Знак плюс в (5.21) соответствует  , а минус
, а минус  . Из (5.21) также видно, что при работе в генераторном режиме с рекуперацией энергии критический момент больше, чем в двигательном режиме.
. Из (5.21) также видно, что при работе в генераторном режиме с рекуперацией энергии критический момент больше, чем в двигательном режиме.
Из (5.19) и (5.21) с учётом (5.20) может быть получена другая формула для механической характеристики
 , (5.22)
, (5.22)
в которой параметрами являются величины ,  , и
, и  . На практике иногда полагают, что
. На практике иногда полагают, что  . Это обычно не приводит к существенным погрешностям при
. Это обычно не приводит к существенным погрешностям при  5кВт. В этом случае можно воспользоваться упрощёнными формулами
5кВт. В этом случае можно воспользоваться упрощёнными формулами
 (5.23)
(5.23)
 ; (5.24)
; (5.24)
 . (5.25)
. (5.25)
Основное преимущество записи механической характеристики в виде (5.23) по сравнению с (5.22) заключается в том, что для (5.23) достаточно знать лишь параметры, которые обычно указываются в каталогах. В каталогах на асинхронные двигатели, помимо номинальных данных  ,
,  ,
,  и др., приводится значение
и др., приводится значение  , которое называют также перегрузочной способностью.
, которое называют также перегрузочной способностью.
Другие параметры и величины можно определить по следующим формулам:
номинальный момент
 , (5.26)
, (5.26)
номинальное скольжение
 , (5.27)
, (5.27)
критическое значение скольжения для машин малой мощности с 
 .
.
 , (5.28)
, (5.28)
для крупных двигателей (  =0)
=0)
 . (5.29)
. (5.29)
Для анализа формы механической характеристики и режимов работы асинхронного электропривода воспользуемся формулами (5.23) – (5.29). На рис. 5.7 представлена механическая характеристика асинхронного двигателя  .
.
Как и для двигателей постоянного тока, у асинхронного двигателя имеется естественная механическая и электромеханическая характеристики при  ,
,  , и отсутствии добавочных сопротивлений в статорной и роторной цепях. Все другие характеристики искусственные.
, и отсутствии добавочных сопротивлений в статорной и роторной цепях. Все другие характеристики искусственные.
Проанализируем форму механической и скоростной характеристик, представленной на рис. 5.7.
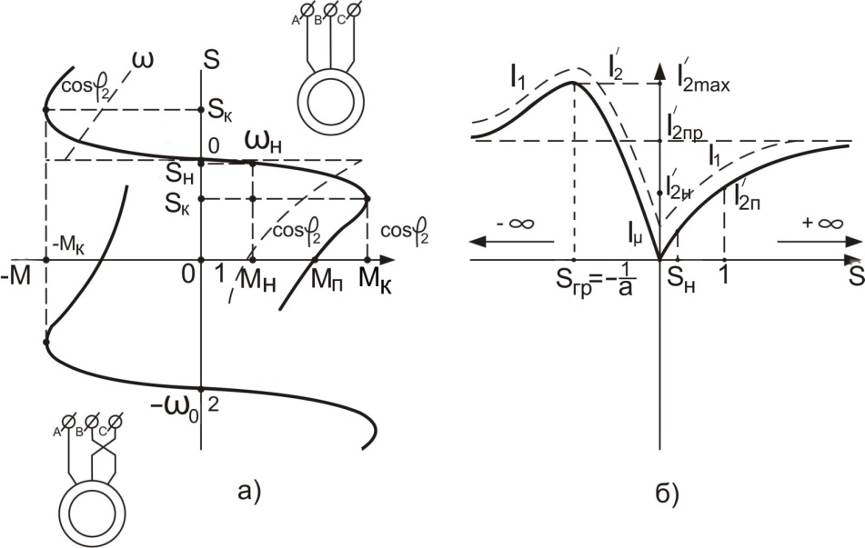 Рис. 5.7. Зависимости
Рис. 5.7. Зависимости  ,
,  (а), и
(а), и  ,
,  (б) асинхронного двигателя
(б) асинхронного двигателя
При изменении скольжения от 0 до 1 асинхронная машина работает в двигательном режиме. Скольжению S=0 соответствует идеальный холостой ход, ротор двигателя имеет синхронную скорость  . Скольжение
. Скольжение  свидетельствует о номинальной скорости вращения ротора
свидетельствует о номинальной скорости вращения ротора  , двигатель при этом развивает номинальный момент и по обмоткам протекают номинальные токи
, двигатель при этом развивает номинальный момент и по обмоткам протекают номинальные токи  ,
,  . При скольжении
. При скольжении  двигатель развивает максимальный (критический) момент
двигатель развивает максимальный (критический) момент  . Скольжению
. Скольжению  соответствует пусковой момент
соответствует пусковой момент
 <
<  , (5.30)
, (5.30)
который при  равен .
равен .
При скольжении  асинхронная машина работает в режиме противовключения.
асинхронная машина работает в режиме противовключения.
Скольжению  соответствует генераторный режим параллельно сетью (рекуперативное торможение), в котором
соответствует генераторный режим параллельно сетью (рекуперативное торможение), в котором  >
>  .
.
Зависимость  можно получить из схемы замещения рис. 5.4
можно получить из схемы замещения рис. 5.4
 , (5.31)
, (5.31)
следовательно,  при возрастании модуля скольжения монотонно убывает, стремясь при
при возрастании модуля скольжения монотонно убывает, стремясь при  к нулю (рис. 5.7,а).
к нулю (рис. 5.7,а).
Как следует из формулы (5.10) с изменением скольжения от нуля до  ток ротора монотонно увеличивается до
ток ротора монотонно увеличивается до  (рис. 5.7,б)
(рис. 5.7,б)
 . (5.32)
. (5.32)
При  пусковой ток определяется по формуле
пусковой ток определяется по формуле
 (5.33)
(5.33)
и составляет на естественной характеристике  . Для уменьшения пусковых токов, необходимо включать в роторную цепь (АД с фазным ротором) активные или индуктивные сопротивления, а также в статорную цепь двигателей.
. Для уменьшения пусковых токов, необходимо включать в роторную цепь (АД с фазным ротором) активные или индуктивные сопротивления, а также в статорную цепь двигателей.
В генераторном режиме параллельно с сетью при изменении  ток растёт до своего максимального значения при
ток растёт до своего максимального значения при 
 , (5.34)
, (5.34)
а затем монотонно снижается до  (рис. 5.7,б). При
(рис. 5.7,б). При  вектор тока ротора перпендикулярен вектору
вектор тока ротора перпендикулярен вектору  и является чисто реактивным, и рекуперация энергии в сеть прекращается.
и является чисто реактивным, и рекуперация энергии в сеть прекращается.
Если принять магнитный поток Ф=const, то, как следует из формулы (5.4) момент двигателя достигает максимального значения  при
при
 , (5.35)
, (5.35)
где  ;
;
 .
.
Максимальное значение момента двигателя в двигательном режиме определяет его перегрузочную способность. При этом нужно иметь в виду, что пропорционален квадрату приложенного напряжения  , вследствие чего асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. В каталожных данных для асинхронных двигателей указывается перегрузочная способность двигателя при номинальном напряжении
, вследствие чего асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. В каталожных данных для асинхронных двигателей указывается перегрузочная способность двигателя при номинальном напряжении  . При определении момента допустимой перегрузки следует учитывать возможное снижение напряжения сети на 10%
. При определении момента допустимой перегрузки следует учитывать возможное снижение напряжения сети на 10%
 .
.
В таблице 5.1 для некоторых серийно выпускаемых двигателей приводятся значения перегрузочной способности и кратности пускового момента по отношению к номинальному  .
.
Таблица 5.1.
Коэффициенты  и
и 
| Серия или модификация исполнения двигателя | 
|
| |
| Двигатели с к/з ротором единой серии 4А: с повышенным скольжением с ротором нормального исполнения с повышенным пусковым моментом | 1,8-2,4 1,7-2,2 2,2 | 1,7-2,2 1-1,9 1,7-1,8 | |
| Двигатели с к з. ротором краново – металлургической серии 4МТК | 2,6 – 3,6 | 2,5-3,3 | |
| Двигатели с фазным ротором модификация 4А | 1,7-2,0 | - | |
| Двигатели с фазным ротором краново – металлургической серии 4МТ | 2,3-3,0 | - |
Дата добавления: 2019-02-08; просмотров: 1079;
Поиск по сайту
Узнать еще
- II. Механические передачи
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А. Механические методы
- А.2 Виды адсорбентов и их характеристики

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
