Уравнения состояния дискретных систем
Способ математического описания дискретных систем разностными уравнениями является наиболее общим и применяется как для линейных, так и для нелинейных систем. Разностные уравнения позволяют провести полное исследование системы, они хорошо приспособлены для решения задач анализа и синтеза с помощью ЭВМ
 |
Вопрос о составлении разностных уравнений импульсной системы
Рис. 33
удобно рассмотреть сразу для многомерной САУ. Уравнения для системы с одним входом и одним выходом получатся тогда как частный случай.
Рассмотрим многомерную синхронную синфазную импульсную систему (рис.33). Импульсные элементы в этой схеме имеют одинаковые частоты квантования и работают синфазно. Пусть непрерывная часть системы описывается уравнением
 (53)
(53)
 (54)
(54)
где  -мерный вектор переменных состояния;
-мерный вектор переменных состояния;  -мерный вектор входных воздействий,
-мерный вектор входных воздействий,  -мерный вектор выходных переменных.
-мерный вектор выходных переменных.
Матрицы A,B,C,D имеют следующие размерности: A-(n´n) матрица, B-(n´m) матрица, C-(r´n) матрица и D-(r´m) матрица . Графически уравнениям (53), (54) соответствует структурная схема, представленная на рис.34. Здесь и далее двойные стрелки на схеме указывают на то, что связи относятся к векторным величинам.
Матрица A - основная или собственная матрица системы. Она определяет устойчивость системы, характер ее свободных движений Матрица B - матрица формирования управления. Она определяет передаточные свойства системы и характеристики вынужденного движения. Матрица C определяет связь между выходными переменными и переменными состояния, матрица D устанавливает непосредственную зависимость выходных координат системы от входных переменных,
Рис. 34
 |
Рассмотрим решение дифференциального уравнения (53) при заданных начальных условиях
 и известных входных воздействиях u(t) . Как известно, общее решение неоднородного дифференциального матричного уравнения с постоянными коэффициентами имеет вид
и известных входных воздействиях u(t) . Как известно, общее решение неоднородного дифференциального матричного уравнения с постоянными коэффициентами имеет вид
 ,
,
где X(t) - произвольная фундаментальная матрица соответствующего однородного дифференциального уравнения. Выбрав в качестве X(t) нормированную фундаментальную матрицу (для стационарной системы она имеет вид  ), получим
), получим
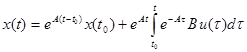 . (55)
. (55)
Предположим, что в качестве формирующего звена используется экстраполятор нулевого порядка. Тогда в течение каждого из интервалов квантования  на вход непрерывной части поступает постоянный сигнал u(t)=const=u[kT]. Полагая известными значения переменных состояния при
на вход непрерывной части поступает постоянный сигнал u(t)=const=u[kT]. Полагая известными значения переменных состояния при  , найдем их значения при t=(k+1)T . Подставив соответствующие значения в уравнение (55), получим
, найдем их значения при t=(k+1)T . Подставив соответствующие значения в уравнение (55), получим
 . (56)
. (56)
Таким образом, получена система разностных уравнений в матричной форме, определяющая значения переменных состояния на k+1 такте через значения вектора состояния и вектора входных воздействий на предыдущем шаге. Векторное уравнение (56) можно представить в виде

Дополняя его дискретным аналогом уравнения (54), получим окончательную систему разностных уравнений в виде
(57)
 (58)
(58)
где Ф - собственная матрица импульсной системы,  ; H матрица входа,
; H матрица входа,
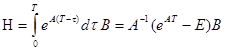 ; Е- единичная матрица соответствующей размерности. Матрицы С и D при переходе от уравнений (54) и (58) не изменяются.
; Е- единичная матрица соответствующей размерности. Матрицы С и D при переходе от уравнений (54) и (58) не изменяются.
Таким образом, получена система разностных уравнений, описывающая рассматриваемую импульсную систему.
3. Некоторые способы вычисления переходной матрицы.
Из выражений для матриц Ф и Н , входящих в уравнение (57) легко видеть, что основные сложности при переходе от системы (53), (54) к системе разностных уравнений (57), (58) заключаются в вычислении собственной матрицы , которая является переходной матрицей непрерывной части. Для ее нахождения используют как аналитические, так и численные методы .Наиболее часто аналитические методы связаны с решением однородного дифференциального уравнения
 (59)
(59)
при произвольных начальных условиях  . Применяя для решения уравнения преобразование Лапласа, получаем
. Применяя для решения уравнения преобразование Лапласа, получаем
 ,
,
где  . Отсюда
. Отсюда

и тогда
 .
.
Из последнего соотношения следует, что

Существуют и другие аналитические методы нахождения матрицы [2]. Однако все аналитические методы отличаются сложностью и трудоемкостью, которые возрастают с ростом размерности вектора состояния системы.
Численные методы определения матрицы основаны на вычислении суммы матричного ряда

где  - число удерживаемых членов бесконечного ряда.
- число удерживаемых членов бесконечного ряда.
Недостаток вычисления матрицы Ф по этому методу - плохая сходимость степенного разложения, которая вместе с учетом конечной разрядности ЭВМ может привести к существенным погрешностям в вычислениях (вплоть до неверного определения знака у элементов матрицы Ф).
Лучшей сходимостью обладают алгоритмы, основанные на использовании степенных рядов, полученных в результате разложения по полиномам Чебышева [2] . Наконец, элементы матрицы Ф могут быть получены в результате повторного n -кратного численного решения дифференциального уравнения (59). После численного интегрирования в интервале от 0 до Т уравнения (59) для  , найденный вектор x(T) при t=T будет представлять собой первый столбец матрицы Ф . Аналогично, решив численно уравнение (59) при
, найденный вектор x(T) при t=T будет представлять собой первый столбец матрицы Ф . Аналогично, решив численно уравнение (59) при  , получим второй столбец матрицы Ф , а в результате n-кратного интегрирования матрица Ф будет определена полностью. Таким же способом можно численно вычислить и матрицу Н. Для этого необходимо проинтегрировать m раз уравнение (53), положив x=0 и приравнивая к единице поочередно компоненты вектора входных воздействий u.
, получим второй столбец матрицы Ф , а в результате n-кратного интегрирования матрица Ф будет определена полностью. Таким же способом можно численно вычислить и матрицу Н. Для этого необходимо проинтегрировать m раз уравнение (53), положив x=0 и приравнивая к единице поочередно компоненты вектора входных воздействий u.
Дата добавления: 2016-07-05; просмотров: 2743;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
