Механизм передвижения
Передвижение крана по рельсовому пути со скоростью 10 м/мин обеспечивает меха
низм передвижения.
Каждая из четырех опор через шарнирные соединения опирается на 2 тележки, ко-
торые приводятся в движение восемью АД с фазным ротором мощностью по 3,7 кВт, име-
ющими встроенные дисковые электромагнитные тормоза.
Электропривод механизма передвижения обеспечивает мягкую падающую механи-
ческую характеристику, которая достигается благодаря постоянно включенному в цепь ротора добавочному резистору (с этим резистором АД развивает пусковой момент 2,5 Мн).
Благодаря тиристорному регулированию напряжения на статоре и обратной связи по скорости .обеспечивается устойчивая угловая скорость АД в широком диапазоне.
Тиристорный регулятор напряжения управляет работой всех АД механизма пере-
движения и получает питание через автоматический выключатель от силовой цепи.
Основу регулятора составляет тиристорный блок (в каждую фазу встречно включе
ны по 2 тиристора).
На рис. 240 показана тиристорная схема управления для одного АД механизма пере
движения.
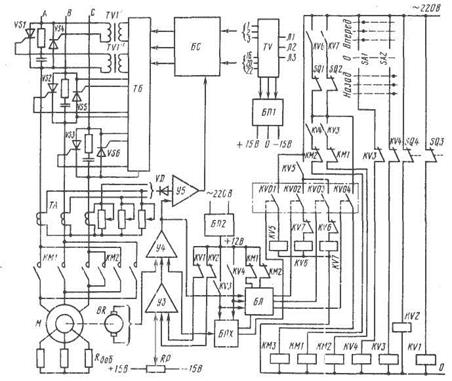
Рис. 240. Принципиальная схема электропривода механизма передвижения крана
Работой тиристоров VS1-VS6 управляет блок синхронизации БС совместно с триг
герным блоком ТБ.
Питание вспомогтельных цепей ТРН обеспечивает трансформатор TV, от которого подается напряжение на блоки питания БП1 и БП2 и различные усилительные устройства других блоков.
Управление механизмом передвижения осуществляется командоконтроллером, при перемещении рукоятки которого, кроме замыкания соответствующих контактов, изменяет положение движок потенциометра RP, связанный с ней.
С потенциометра подается пропорциональное положению рукоятки напряжение, задающее значение скорости.
Это напряжение усиливается усилителем УЗ и подается на усилитель У4. На этот усилитель также поступает напряжение с присоединенного к электродвигателю М тахоге-
нератора BR, которое пропорционально скорости и понимается как действительное значе-
ние скорости (в начальный период пуска, когда n = 0, то U br = 0).
Разность напряжений между задающим значением и действительным снимается с выхода усилителя У4.
Полярность сигнала разности, а она зависит прежде всего от полярности задающе-
го сигнала, определяет направление момента, а его абсолютное значение - значение момен
та. Эти сигналы параллельно поступают как на блок БЛ логики, определяющий направле-
ние вращения АД, так и на усилитель У5, который регулирует скорость благодаря измене-
нию момента.
На усилитель У5, кроме заданного значения тока, поступающего с усилителя У4, подается также действительное значение тока от включенных по схеме «звезда» трансфор
маторов тока ТА.
На выходе усилителя У5 создается напряжение управления, которое поступает на блок синхронизации и управляет открытием тиристоров в цепи АД исходя из существу-
ющей разницы токов. Подаваемое на статор АД напряжение регулируется тиристорами таким образом, чтобы разность между задающим значением и действительным током оставалась наименьшей.
Следует отметить, что в начальный период пуска, когда угол отклонения рукоятки контроллера мал, задающий сигнал, снимаемый с потенциометра, также имеет небольшое значение. Это обусловливает большой угол открытия тиристоров и малое напряжение на статоре.
При дальнейшем движении рукоятки контроллера увеличивается подводимое к АД напряжение, в результате создается необходимый пусковой момент и кран начинает дви-
жение в заданном направлении, постепенно увеличивая скорость.
Дата добавления: 2020-02-05; просмотров: 903;
Поиск по сайту
Узнать еще
- A) четырехшарнирный механизм
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Алгоритм проектирования кулачкового механизма по допустимому углу давления
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).
- АНАЛИЗ МЕХАНИЗМА ЦЕНООБРАЗОВАНИЯ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
