Электропривод козлового крана
Во время грузовых операций судно при открытой рампе с помощью мощной бал-
ластной системы притапливается и груз на понтоне заводится в трюм.
Механизм подъема
Кран имеет 2 механизма подъема грузоподъемностью по 175 т и 8 механизмов пере
движения.
Для подъема грузов массой более 175 т предусмотрена параллельная работа обоих грузоподъемных механизмов (система управления обеспечивает движение гаков в этом режиме с одинаковой скоростью при всех положениях контроллера).
Для привода грузоподъемного механизма применен 3-фазный АД с фазным рото-
ром мощностью 22 кВт и частотой вращения 1000 об/мин.
Вращение вала АД передается на канатный барабан через 2 редуктора, один из ко-
торых имеет переключатель скорости.
В положении рычажного переключателя «40 т» можно поднимать грузы массой до 40 т со скоростью 2 м/мин. В положении рычажного переключателя «175 т» можно подни-
мать грузы массой до 175 т со скоростью 0,5 м/мин.
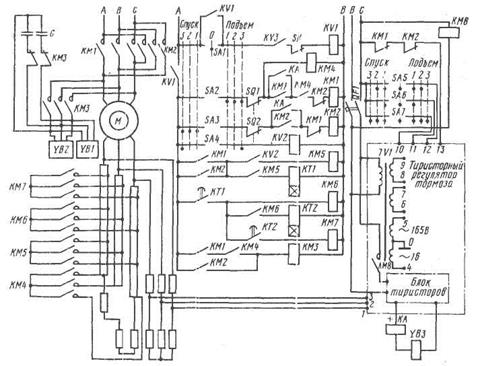
Рис. 237. Функциональная схема электропривода механизма подъема крана
Регулирование угловой скорости АД осуществляется двумя способами:
1. изменением сопротивления цепи фазного ротора;
2. изменением механической нагрузки АД с помощью тормоза вихревых токов YB3 (рис. 237 ).
В первом случае скорость регулируется путем введения ( выведения ) регулировоч-
ных резисторов в цепь ( из цепи ) фазного ротора.
Второй принцип вытекает из приближенного уравнения рабочей части механиче-
ской характеристики АД
ω = ω0 — кМ,
где ω – текущее значение скорости ( т.е. скорости в данный момент времени );
ω0 - скорость идеального холостого хода ротора, или, что одно и то же, скорость вращения магнитного поля обмотки статора;
к – конструктивный коэффициент ( постоянная величина );
М – электромагнитный момент двигателя.
Из уравнения следует, что изменение механической нагрузки, а значит, и электро-
магнитного момента М асинхронного двигателя вызывает изменение его угловой скоро-
сти.
В данной схеме момент на валу АД изменяется при помощи тормоза вихревых то-
ков, который непосредственно подсоединен к валу АД.
Тормоз состоит из неподвижного статора, в котором расположены полюса, намаг-
ничиваемые постоянным током катушек, и вращающегося ротора, механически связанно-
го с ротором АД подъема.
При вращении ротора через его обод проходит магнитный поток полюсов статора и в ободе ротора индуцируются вихревые токи. Взаимодействие вихревых токов и магнит-
ного потока полюсов создает на роторе тормозной момент, который передается на АД в виде дополнительной механической нагрузки.
Значение тормозного момента зависит от значения постоянного тока полюсов, кото
рый регулируется специальным тиристорным регулятором.
Питание тиристорного регулятора и управление им обеспечивается основной систе
мой управления (см. рис. 237).
Схема системы управления представлена в сокращенном виде: из нее исключены
различные конечные выключатели, блокировочные устройства, регулятор разницы уров-
ней гаков и др.
Чтобы уяснить принцип действия основной схемы, рассмотрим сначала работу ти
ристорного регулятора тормоза, упрощенная схема которого показана на рис. 238.
Дата добавления: 2020-02-05; просмотров: 869;
Поиск по сайту
Узнать еще
- Алгоритм моделирования системы электропривода по методу структурных схем
- Алгоритм моделирования системы электропривода по методу уравнений состояния
- Анализ результатов функционального синтеза системы электропривода
- Аналитический метод исследования переходных процессов электропривода на базе математической модели двигателя постоянного тока
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Асинхронный двигатель для параметрического электропривода
- Асинхронный электропривод на основе ПЧ с АИН и управляемым выпрямителем
- Асинхронный электропривод на основе ПЧ с АИН с широтно-импульсной модуляцией

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
