Ограничители грузоподъемности и грузового момента
В кранах с постоянной грузоподъемностью ограничитель должен ограничивать только массу груза, а в стреловых кранах с переменной грузоподъемностью, зависящей от вылета стрелы, — момент, создаваемый весом груза.
Ограничители массы груза или грузоподъемности выполняют в виде подпружиненного подвеса концевой ветви каната или канатного блока грузового полиспаста (рисунок 15.9, а, б). При перемещении тяга подвеса или хвостовой конец его через рычаг действуют на контактную систему рычажного или кнопочного выключателя.
Находят применение и торсионные ограничители, в которых функции пружины выполняет тонкий закручиваемый вал 1 (рисунок 15.9, в).
Один его конец А закреплен жестко, а поворачиваемый конец В несет стержень 3, действующий на кнопку конечного выключателя 2.
Ограничители грузового момента включаются обычно не в систему грузового полиспаста, а в систему стрелового полиспаста, поскольку усилие в нем является функцией не только веса поднимаемого груза и стрелы, но и вылета крюка.
Механические ограничители грузоподъемности и грузового момента не получили распространения из-за присущего им недостатка — большой инерционности; удобными и универсальными являются электромеханические ограничители.
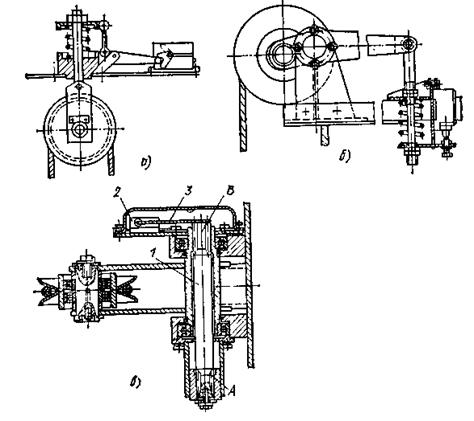
Рисунок 15.9 - Ограничители грузоподъемности:
а, б — с восприятием натяжения грузового каната пружиной; в — торсионный
Серийно изготовляют и применяют на многих строительных кранах электромеханический ограничитель грузового момента. Он встраивается в канатные оттяжки 1 (расчал) стрелового полиспаста (рисунок 15.10, а), стягивая их между собой в пределах распорок 2. Ограничитель (рисунок 15.10, б) представляет собой электрический динамометр 3, имеющий упругое кольцо 5, деформация которого передается на рычажный потенциометр 4. Для учета положения (вылета) стрелы крана применен второй потенциометр 6 (рисунок 15.10, в), рычажок 7 которого управляется кулачком 8, поворачиваемым через передачу 9 стрелой 10 крана. Каждому положению стрелы, а следовательно, и рычажка 7, соответствует определенная допустимая грузоподъемность. Принцип работы ограничителя заключается в сравнении сигналов потенциометров, когда эти сигналы равны между собой, ограничитель срабатывает.
Указатель ограничителя выполнен в виде панели, на которой смонтированы стрелочный прибор и сигнальные лампы: зеленая и красная. Стрелочный прибор, подсоединенный параллельно поляризованному реле, показывает степень загрузки для данного вылета. Промежуточное реле включает также звуковой сигнал.
Ограничитель выполняют в виде отдельных блоков — датчика усилия с потенциометром, датчика угла и релейного блока. При качественном выполнении ограничитель работает надежно с точностью срабатывания ±5 %. Модификацией ограничителя модели ОГП является ограничитель модели ОГБ-2, в котором контактные устройства заменены бесконтактными трансформаторными преобразователями (рисунок 15.11).

Рисунок 15.10 - Ограничитель грузового момента:
а — схема размещения датчика усилия; б — датчик усилия; в - схема размещения датчика угла
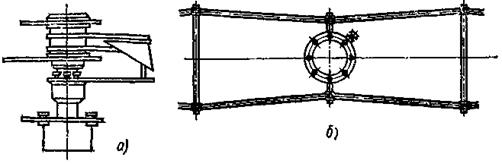
Рисунок 15.11 - Схемы размещения:
а — датчика угла; б — датчика усилия
Гидравлические краны с телескопическими стрелами оборудуют универсальными бесконтактными ограничителями грузоподъемности ОГБ-3. Принцип работы ОГБ-3 основывается на сравнении рабочего усилия, которое измеряется датчиком усилий, с предельно допустимыми усилиями, которые задаются датчиками длины стрелы и вылета [4]. Если рабочее усилие превысит допустимое, то ограничитель сработает и выключит крановый механизм. В отличие от ОГБ-2 ограничитель ОГБ-3, кроме датчиков усилия и вылета (угла), оборудован датчиком длины стрелы, конструкция которого аналогична конструкции датчика вылета (рисунок 15.12, а).

Рисунок 15.12 – Установка датчиков ограничителя ОГБ-3 (а) и гидротолкатель (б) гидравлических кранов с телескопическими стрелами:
1 – винт, 2 – струна, 3 – ролик, 4 – рычаг, 5 – ось, 6 – пружина, 7 – датчик длины пружины, 8 – неподвижная секция стрелы, 9 – датчик усилий, 10 – гидротолкатель, 11 – блок питания, 13 – поводок, 14 – датчик вылета, 15, 24 – уплотнения, 16, 22 – плунжеры, 17, 21 – штуцеры, 18, 19, 23 – уплотнительные кольца, 20 - корпус
Датчик усилий устанавливают на гидроцилиндре подъема стрелы. Его конструкция аналогична конструкции датчика усилий ОГБ-2. На подвижное ушко датчика действует гидротолкатель 10. В торце корпуса 20 гидротолкателя (рисунок 15.12, б) вкручены штуцеры 17 и 21 с плунжерами 16 и 22. Поршневые полости плунжеров I и II через каналы III и IV соединены соответственно со штоковой и поршневой полостями гидроцилиндра подъема стрелы.
Давление в штоковой и поршневой полостях изменяется по определенному закону в зависимости от вылета стрелы. В соответствии с этим изменяется и давление в полостях I и II гидротолкателя. В зависимости от давления в полостях I и II изменяется габаритная длина гидротолкателя и пропорционально ей деформируется упругое кольцо датчика усилий, следовательно, изменяется электрический сигнал, что выдается датчиком в електросхему ОГБ-3. Как и в датчике усилий ОГБ-2, деформацию кольца превращает в электрический сигнал трансформаторный преобразователь.
Установка датчика вылета (угла) и конструкция самого датчика ничем не отличаются от такого же датчика ограничителя ОГБ-2.
Датчик длины встретили установлен на головке неподвижной секции 5; его конструкция такая же, как и датчика вылета. На фланце датчика 7 закреплен рычаг 4, на оси которого установлен ролик 3. Пружиной 6 ролик отжимается к струне 2, закрепленной на неподвижной секции стрелы так, что между струной и осью стрелы образуется некоторый угол a. Во время выдвижения стрелы струна действует на ролик 3, отжимая рычаг вниз. Поворачиваясь, рычаг поворачивает и фланец датчика. Угол поворота фланца превращается трансформаторным преобразователем в электрический сигнал, который выдается датчиком в электрическую схему ОГБ-3. Струну натягивают винтом 1, который может перемещаться в направлении Б, регулируя давление струны на ролик 3. Блоки питания 11 и управления 12 размещены в кабине машиниста.
Электрический ограничитель ОГБ-4 (рисунок 15.13) применяют в кранах с гидроприводом и телескопическими стрелами. Принцип действия ограничителя заключается в сравнении сигнала фактической нагрузки от массы груза, стрелы и силы ветра с сигналом допустимой нагрузки на кран. Сигнал фактической нагрузки вырабатывается преобразователями 2 и 3, а сигнал допустимой нагрузки - преобразователями 4...7. Сигналы от преобразователей подаются в блок управления и автоматически выключают соответствующие исполнительные механизмы (ВМ) в случае, если фактические нагрузки выше по сравнению с допустимыми.
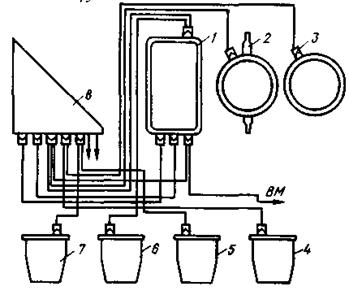
Рисунок 15.13 - Ограничитель грузоподъемности ОГБ-4:
1 – блок управления, 2, 3 - преобразователи усилий, 4…6 — преобразователи углового положення стрелы, 7 - преобразователь длины стрелы, 8 - панель управления
Дата добавления: 2018-11-26; просмотров: 2169;
Поиск по сайту
Узнать еще
- В.3 Зависимость момента сопротивления повороту от эпюры давления на грунт.
- Вопрос 16. Выбор грузоподъемности автопоезда.
- Вопрос 20. Выбор грузоподъемности автопоезда.
- Вопрос 5. Производительность грузового автомобиля.
- Вопрос 6. Производительность грузового автомобиля.
- Вычисление расчетного коэффициента нажатия тормозных колодок при наличии грузового авторежима.
- Г) зависимости момента от угла поворота ротора.
- Динамика вращательного движения твердого тела. Закон сохранения момента импульса

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
