Приборы связи машиниста с наземными пунктами
Для связи крановщика с наземными пунктами (местами захвата и установки груза и т.п.) применяется ручная сигнализация, мегафоны и телефонная связь по проводам, включенным в общий многожильный кабель электропитания крана. Более целесообразно использовать радиотелефонную связь. При необходимости наблюдать за местом загрузки и разгрузки целесообразно применять специализированные промышленные телевизионные установки.
16. УСТОЙЧИВОСТЬ СТРЕЛОВЫХ КРАНОВ.
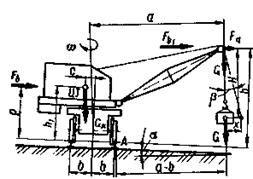
Для безопасной эксплуатации все передвижные краны должны иметь достаточную устойчивость от опрокидывания. Особенно высокие требования устойчивости предъявляются к стреловым кранам, где она обеспечивается только силой собственного веса, проекция которой на плоскость опоры всегда должна находиться внутри опорного контура (рисунок 16.1). Опрокидывающими силами являются: вес груза, инерционные силы при работе механизмов крана и ветровые нагрузки. Согласно нормам Госнадзорохрантруда Украины расчет кранов на устойчивость должен быть выполнен как для рабочего положения крана с грузом (грузовая устойчивость), так и для нерабочего состояния крана без груза (собственная устойчивость) при наиболее неблагоприятном сочетании нагрузок. Устойчивость крана характеризуется коэффициентом устойчивости.
Коэффициентом грузовой устойчивости крана называют отношение момента относительно ребра опрокидывания, создаваемого весом всех частей крана с учетом всех дополнительных нагрузок (ветровой, инерционных сил, возникающих при пуске или торможении механизмов подъема груза, поворота и передвижения крана) и сил от наибольшего допустимого при работе уклона, к моменту, создаваемому рабочим грузом относительно того же ребра опрокидывания.
Коэффициент собственной устойчивости крана определяется как отношение момента, создаваемого весом всех частей крана с учетом уклона пути в сторону опрокидывания относительно ребра опрокидывания, к моменту, создаваемому ветровой нагрузкой (принимаемой по ГОСТ 1451—77 нерабочего состояния крана относительно того же ребра опрокидывания).
а) в)
Рисунок 16.1 - Расчетные схемы устойчивости передвижных кранов
Должна быть обеспечена грузовая устойчивость крана при следующем положении стрелы:
1) перпендикулярно (поперек) пути;
2) при расположении стрелы под углом 45 ° (в плане) к направлению движения;
3) вдоль пути.
Угол наклона стреловых кранов при расчетах должен составлять не менее 3° (за исключением железнодорожных); для портальных 1°.
Расчет грузовой устойчивости выполняют при максимальном вылете стрелы.
Коэффициент грузовой устойчивости
 , (16.1)
, (16.1)
где  - момент удерживающих сил относительно ребра опрокидывания А; å
- момент удерживающих сил относительно ребра опрокидывания А; å  - суммарный момент сил инерции элементов крана, и груза в период пуска и торможения механизмов; МВ - момент, создаваемый ветровой нагрузкой рабочего состояния крана; МГ - момент, создаваемый весом номинального груза относительно ребра опрокидывания.
- суммарный момент сил инерции элементов крана, и груза в период пуска и торможения механизмов; МВ - момент, создаваемый ветровой нагрузкой рабочего состояния крана; МГ - момент, создаваемый весом номинального груза относительно ребра опрокидывания.
Определим значения составляющих моментов для трех положений стрелы.
Первый случай — стрела расположена поперек пути.
Момент удерживающих сил (рисунок 16.1, а)
 (16.2)
(16.2)
где GK - собственный вес крана; b — расстояние от оси вращения крана до ребра опрокидывания; с — расстояние от плоскости, проходящей через ось вращения крана параллельно ребру опрокидывания, до центра тяжести крана; a — угол наклона крана; h1 — расстояние от центра тяжести крана до плоскости, проходящей через точки опорного контура.
Момент опрокидывающий, который возникает от центробежной силы груза FЦ, лежащей в плоскости стрелы на расстоянии h:
 . (16.3)
. (16.3)
Значение центробежной силы груза (рисунок 16.1, а):
 (16.4)
(16.4)
где  — масса груза.
— масса груза.
Подставив значение FЦ в формулу (16.3), получим
 (16.4)
(16.4)
где w — угловая скорость вращения крана; L — расстояние от оси вращения крана до центра тяжести подвешенного груза при установке крана на горизонтальной плоскости; h — расстояние от головки стрелы до плоскости, проходящей через точки опорного контура; Н — расстояние от головки стрелы до центра тяжести подвешенного груза (принимая, что центр тяжести расположен на уровне земли).
Момент, создаваемый силой инерции поднимаемого груза при неустановившемся режиме работы
 (16.5)
(16.5)
где — масса груза; u — скорость подъема груза; t0 — время неустановившегося режима работы механизма подъема; а — расстояние от плоскости, проходящей через ось вращения крана параллельно ребру опрокидывания, до центра тяжести подвешенного наибольшего груза при установке крана на горизонтальной плоскости.
При расположении стрелы перпендикулярно к ребру опрокидывания а = L.
Момент, создаваемый силами инерции масс груза и стрелы в горизонтальной плоскости
 (16.6)
(16.6)
здесь  - массы стрелы и стрелового оборудования, приведенные к оголовку стрелы;
- массы стрелы и стрелового оборудования, приведенные к оголовку стрелы;  - составляющая скорости горизонтального перемещения оголовка стрелы; t2 - время неустановившегося режима работы механизма изменения вылета стрелы.
- составляющая скорости горизонтального перемещения оголовка стрелы; t2 - время неустановившегося режима работы механизма изменения вылета стрелы.
Момент, создаваемый силой инерции масс груза и стрелового оборудования в вертикальной плоскости:
 (16.7)
(16.7)
где  — составляющая скорости вертикального перемещения оголовка стрелы.
— составляющая скорости вертикального перемещения оголовка стрелы.
Моменты, создаваемые силой давления ветра на кран и груз,
 (16.8)
(16.8)
где FВ, FВ1 - силы давления ветра, действующие перпендикулярно к ребру опрокидывания и параллельно плоскости, на которой установлен кран; r, h — расстояние от плоскости, проходящей через точки опорного контура, до центра приложения ветровых нагрузок.
Опрокидывающий момент от груза
 (16.9)
(16.9)
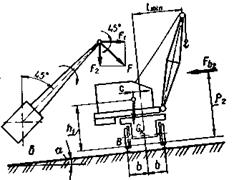
Второй случай — стрела расположена под углом 45° (в плане) к ребру опрокидывания (рисунок 16.1, б).
Определяют дополнительно момент, вызванный резким пуском и торможением механизма поворота:
 . (16.10)
. (16.10)
Касательная сила
 (16.11)
(16.11)
где r — радиус вращения масс с учетом отклонения груза х (400'); t3 — время неустановившегося движения механизма поворота.
Третий случай — стрела расположена вдоль пути.
При перемещении крана с грузом расчет устойчивости в направлении движения ведут аналогичным образом и дополнительно находят момент от сил инерции груза и крана при неустановившемся периоде движения механизма передвижения
 (16.12)
(16.12)
где u1 - скорость движения крана; t1 - время неустановившегося режима работы механизма передвижения крапа,  - масса крана.
- масса крана.
Коэффициент грузовой устойчивости без учета дополнительных сил (ветра, инерции и уклона пути) должен иметь большее значение, и по правилам Госнадзорохрантруда Украины определяют по формуле
 (16.13)
(16.13)
Коэффициент собственной устойчивости крана (рисунок 16.1, в)
 (16.14)
(16.14)
где FВ2 — сила давления ветра для нерабочего состояния; r2 — плечо действия силы.
Во всех случаях действие рельсовых захватов при определении устойчивости не учитывается. Для гусеничных кранов не учитывается вес нижней ветви гусеничной ленты.
17. АВТОТРАНСПОРТНЫЕ СРЕДСТВА С КРАНАМИ И КРАНАМИ-МАНИПУЛЯТОРАМИ
Манипуляторы кранового типа, применяемые для погрузочно-разгрузочных работ в строительстве, должны удовлетворять техническим требованиям, приведенным в ГОСТ 26055—84. Манипуляторы являются перемещаемыми некопирующими, шарнирно-рычажными, телескопическими, обычно гидромеханическими и выполняются в виде полноповоротной колонны, к которой шарнирно прикреплено двухзвенное рабочее оборудование с выдвижным телескопическим звеном, несущим на свободном конце грузозахватный орган, выполненный для обычных погрузочно-разгрузочных работ в виде крюка, а для специальных погрузочно-разгрузочных работ с дистанционно управляемым грузозахватом. Для подачи груза в определенные ячейки с боковым входом манипулятор оборудуют жестким захватом, принудительно вращаемым в двух плоскостях. Такие манипуляторы выполняют на базе гидравлических экскаваторов.
Кран-манипулятор на короткобазовом шасси показан на рисунке 17.1. Общий вид манипулятора с крюковым грузозахватным органом, смонтированного на автомобиле, изображен на рисунке 17.2. В вертикальной плоскости такой манипулятор обслуживает кольцевое пространство (рисунок 17.2, а). В зависимости от транспортируемых грузов манипулятор можно размещать в любом месте транспортного средства (рисунок 17.2, б). В транспортном положении звенья манипулятора складываются в границах габарита транспортного средства (рисунок 17.2, в), занимая малый объем.
Манипулятор монтируют на тракторе (рис. 3.8, г).
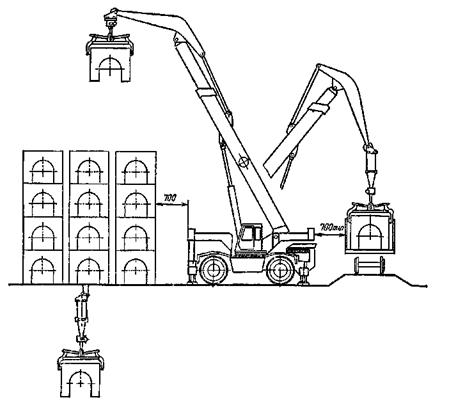
Рисунок 17.1 - Кран-манипулятор на короткобазовом шасси с дистанционно управляемым грузозахватным органом, используемым на перегрузке утяжелителей для трубопроводов
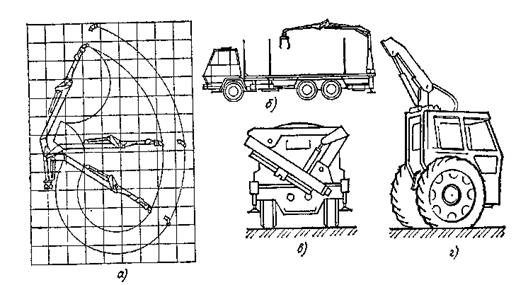
Рисунок 17.2 - Кран-манипулятор шарнирно-звеньевого типа с телескопически выдвижным звеном:
а - общая схема и зоны обслуживания без использования телескопического звена и с его использованием; б - размещение в торцовой части платформы автомобиля; в - размещение на автомобиле в сложенном виде при транспортном перемещении; г - установка на тракторе
Кран-манипулятор может быть оборудован специализированным удлинителем (рисунок 17.3). Такой кран-манипулятор, установленный на автомобиле, имеет грузовой момент 10 т-м при номинальной грузоподъемности 5 т. При выдвижении удлинителя и соответствующей установке секций стрелы его вылет может достигать 11,88 м; грузоподъемность при этом снижается до 0,5 т.
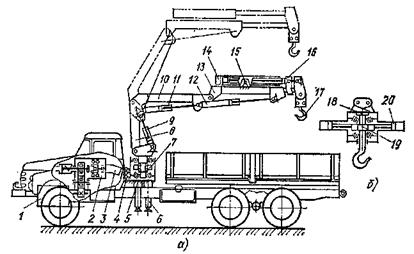
Рисунок 17.3 - Кран-манипулятор на автомобиле:
а - общий вид; б - поворотная головка крюка;
1 - автомобиль; 2 - коробка отбора мощности; 3 - гидронасос; 4 - пульт управления; 5 - опорная рама; 6 - выносная опора; 7 - гидрореечный механизм вращения крана; 8 - стойка манипулятора; 9, 11, 12, 14 - гидроцилиндры; 10 - рукоять; 13 - хвостовая секция; 15 - шарнир гидроцилиндра; 16 - хвостовик; 17 - крюк; 18 - поворотная головка, закрепляемая вместо крюка; 19 - шестерня хвостовика крюка; 20 - штоки с рейкой
Высота подъема составляет до 9,4 м. Стрела в плане может быть повернута в каждую сторону от продольного положения на 200°. Механизм вращения поворотной части гидрореечный, частота вращения 3,5 об/мин. Масса манипулятора (без массы автомобиля) 2,1 т.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Александров М.П.. Грузоподъемные машины: Учеб. для студентов вузов, обучающихся по направлению подготовки дипломир. специалистов "Транспорт. машины и транспорт.-технол. комплексы". - М.: Изд-во МГТУ им. Н. Э. Баумана: Высш. шк., 2000. - 550, [1] с.: ил.
2. Гайдамака В.Ф. Грузоподъемные машины: Учебник. – К.: Выща шк. Головное изд-во, 1989. – 328 с.: ил.
3. Иванченко Ф. К. Конструкция и расчет подъемно-транспортных машин: [Учеб. для техн. вузов] / Ф. К. Иванченко. - 2-е изд., перераб. и доп. - Киев : Выща шк., 1988. - 422,[1] с. : ил.
4. Хмара Л.А. та інші. Будівельні крани: Конструкції та експлуатація / Л.А. Хмара, М.П. Колісник, О.І. Голубченко. – К.: Техніка, 2001. – 296 с.: іл..
5. Правила устройства и безопасной эксплуатации грузоподъемных кранов: НПАОП 0.00-1.01-07: Утв… приказом Гос. Ком. Украины по промышленной безопасности, охране труда и горного надзора 18.06.2007 № 132. - К. : Основа, 2007. - 264 с.: ил.
6. Шабашов А.П., Лысяков А.Г. Мостовые краны общего назначения. – М.: Машиностроение, 1980. – 304 с.
7. Справочник по кранам: В 2 т. Т.1. Характеристики материалов и нагрузок. Основы расчета кранов и приводов и металлических конструкций / В.И. Брауде, М.М. Гохберг, И.Е. Звягин и др.; Под общ. ред. М.М. Гохберга. - М.: Машиностроение, 1988. - 536 с.: ил.
8. Справочник по кранам: В 2т. Т.2. Характеристики и конструктивные схемы кранов. Крановые механизмы, их детали и узлы. Техническая эксплуатация кранов / М.П. Александров, М.М. Гохберг, А.А. Ковин и др.; Под общ. ред. М.М. Гохберга. - М.: Машиностроение, 1988. – 559 с.: ил.
9. Анисимов В.С., Зайцев Л.В. Специальные шасси для стреловых самоходных кранов // Обзорная инф. Сер. 1 «Экскаваторы и стреловые краны». М.: ЦНИИТЭстроймаш, 1984. Вып. 1. - 52 с.
10. Вонг Дж. Теория наземных транспортных средств / Пер. с англ. М.: Машиностроение, 1982. - 284 с.
11. Невзоров Л.А., Гудков Ю.И., Полосин М.Д. Устройство и эксплуатация грузоподъемных кранов: Учеб. для учреждений нач. проф. образования / Л.А. Невзоров, Ю.И. Гудков, М.Д. Полосин. - М. : Academia : ИРПО, 2000. - 443 с. : ил.
12. Проектирование трансмиссий автомобилей: Справочник / Под ред. А.И. Гришкевича. М.: Машиностроение, 1984. - 272 с.
13. Вайнсон А.А. Подъемно-транспортные машины: Учебник для вузов по специальности “Подъемно-транспортные, строительные, дорожные машины и оборудование”. – 4-е изд., перераб. и доп. - М.: Машиностроение, 1989. – 536 с.: ил.
14. Бондарєв В.С., Дубинець О.І., Колісник М.П. та ін. Підйомно-транспортні машини: Розрахунки підіймальних і транспортувальних машин: Підручник. - К.: Вища шк., 2009. – 734 с.
15. Чалова М. Ю. Основы динамики машин: метод. указ. к практическим занятиям для студ. спец. "Подъемно-транспортные, строительные и дорожные средства" / М. Ю. Чалова, А. В. Мишин; МИИТ. Каф. "Путевые, строительные машины и робототехнические комплексы". - М. : МГУПС(МИИТ), 2013. - 35 с. : ил.
Дата добавления: 2018-11-26; просмотров: 1617;
Поиск по сайту
Узнать еще
- IV. Права и обязанности пользователей и организаций почтовой связи
- V. Научно-технический прогресс в области средств связи и информатики
- V. Ответственность операторов почтовой связи и пользователей
- Автоматические регуляторы и контрольно-измерительные приборы
- Аккумуляторная батарея: назначение, тип батареи и его расшифровка. Параметры аккумуляторной батареи. Приборы контроля батареи.
- АНАЛИЗ ВОЗМОЖНОСТЕЙ СУЩЕСТВУЮЩИХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ И СВЯЗИ
- Анализ реализации принципа обратной связи
- Анализ связи альтернативных признаков.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
