Направляющие косинусы вектора
Пусть дан произвольный вектор  ={C;U;Z}; будем считать, что выходит из начала координат и не лежит ни в одной координатной плоскости. Проведем через точку М плоскости, перпендикулярные осям. Вместе с координатными плоскостями они образуют прямоугольный параллелепипед диагональю которого служит отрезок ОМ
={C;U;Z}; будем считать, что выходит из начала координат и не лежит ни в одной координатной плоскости. Проведем через точку М плоскости, перпендикулярные осям. Вместе с координатными плоскостями они образуют прямоугольный параллелепипед диагональю которого служит отрезок ОМ
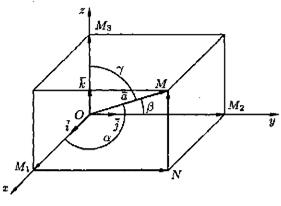
Из элементарной геометрии известно, что квадрат длины диагонали прямоугольного параллелепипеда равен сумме квадратов длин трех его измерений. Следовательно,
|ОМ |2 = |ОМ1 |2 + | ОМ2|2 + | ОМ3 |2.
Но |ОМ | =| |, |  |=|Х|, |
|=|Х|, |  |=|У|, |
|=|У|, |  |=|Z |; таким образом, получаем
|=|Z |; таким образом, получаем  ,
,  (3).
(3).
Обозначим через α, β, γ углы вектор а и осями координат. Из формул (1), (2) и (3) получаем
cosα =  , cos β =
, cos β =  , cos γ =
, cos γ =  ;
;
cosα, cosβ, cosγ называются направляющими косинусами вектора .
Возводя в квадрат левую и правую части каждого из равенств, и суммируя полученные результаты, имеем:
сos2a + cos 2b +cos2 g = 1, т.е. сумма квадратов направляющих косинусов любого вектора равна единице.
В заключении пункта рассмотрим задачу:
Пусть даны две произвольные точки М1 (х1;у1;z1 ), М2(х2; у2;z2 ). Найдем расстояние d между ними. Используя теорему 2, и формулу (3), сразу получаем искомый результат:
 = { х 2 – х; у2 –у 1; z2 –z 1} , а так как d – длина вектора , то d = | | =
= { х 2 – х; у2 –у 1; z2 –z 1} , а так как d – длина вектора , то d = | | =  – формула расстояния между двумя точками, заданными своими координатами.
– формула расстояния между двумя точками, заданными своими координатами.
§2 . Разложение вектора по базису
Определение: Пусть задана система координат Охуz в пространстве. Пусть векторы  ,
,  ,
,  – единичные векторы осей координат, т. е. | | = | | = | | = 1 (т.е. их длины равны единице; единичные векторы еще называют орт – векторами), и каждый из них одинаково направлен с соответствующей осью координат. Тройка векторов , , называется базисом.
– единичные векторы осей координат, т. е. | | = | | = | | = 1 (т.е. их длины равны единице; единичные векторы еще называют орт – векторами), и каждый из них одинаково направлен с соответствующей осью координат. Тройка векторов , , называется базисом.
Имеет место следующая теорема:
Теорема 3:Любой вектор может быть единственным образом разложен по базису , , , т. е. представлен в виде: = l +m + h , где l, m, h – некоторые числа.
Доказательство: Приложив вектор к началу координат, обозначим его конец через М (смотри рисунок §1, 1,6.). Проведем через точку М плоскости, перпендикулярные осям координат. Пусть М1, М2, М3 – точки пересечения этих плоскостей с осями координат. По определению сложения векторов имеем:
=  + , =
+ , =  +
+  . (1)
. (1)
Из этого равенства получаем = + +  . Так как векторы и , и , и коллинеарны, то = l , = m , = h (2), где l, m, h – некоторые числа.
. Так как векторы и , и , и коллинеарны, то = l , = m , = h (2), где l, m, h – некоторые числа.
Из равенства (1) и соотношений (2) получаем = l +m + h .
Для доказательства единственности этого представления установим, что l=Х, m=У , h=Z , где Х, У, Z – координаты вектора .
Покажем, например, что l=Х. Так как Х=½ ½, если имеет то же направление, что и вектор  , и Х= - ½ ½, если вектор имеет направление, противоположное направлению вектора , то = Х . Сравнивая с равенством = l , получаем l = Х. Аналогично показывается, что m = У, h = Z . g
, и Х= - ½ ½, если вектор имеет направление, противоположное направлению вектора , то = Х . Сравнивая с равенством = l , получаем l = Х. Аналогично показывается, что m = У, h = Z . g
Дата добавления: 2022-02-05; просмотров: 605;
Поиск по сайту
Узнать еще
- Аналітичне визначення головного вектора та головного моменту
- Арифметичні операції над векторами.
- Аэростатические направляющие
- Базис векторного пространства. Координаты вектора
- БАЗОВЫЕ ДЕТАЛИ И НАПРАВЛЯЮЩИЕ
- В случае векторного способа задания движения вектор скорости точки равен первой производной по времени от ее радиус-вектора
- Векторами и комплексными числами
- Волокнами, не совпадающими с векторами действия сил

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
