И мгновенного центра ускорений (МЦУ) звена
Для определения МЦС и МЦУ используют теорему подобия, а на плане механизма строят фигуры, подобные фигурам (треугольникам) на планах скоростей и ускорений (рис. 2.3).
Из теоретической механики известно, что плоскопараллельное движение звена механизма в каждый момент времени может быть представлено как вращение вокруг некоторой точки, которую называют мгновенным центром вращения или мгновенным центром скоростей (МЦС). Если данная точка относится к станине (стойке) механизма, т.е. является неподвижной, то соответствующий МЦС называют мгновенным центром скоростей в абсолютном движении рассматриваемого звена. Таким образом, если мы представим, что точка PV2 принадлежит шатуну (рис. 2.3), то её скорость будет равна нулю.
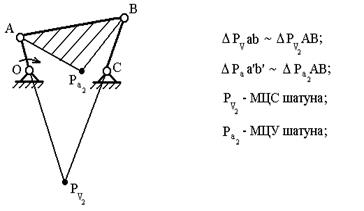
Рис. 2.3. Определение положений мгновенных центров скоростей PV2 и ускорений Ра2 шатуна
Если же рассматривается движение звена относительно любого подвижного звена механизма, то соответствующий МЦС называют мгновенным центром скоростей в относительномдвижении рассматриваемых звеньев.
Аналогично может быть найдена условная точка, принадлежащая звену, абсолютное ускорениекоторой в данный момент времени равно нулю. Эта точка называется мгновенным центром ускорений (МЦУ) звена. Если звено механизма совершает сложное плоскопараллельное движение, то меняются и положения МЦС и МЦУ.
Планы скоростей и ускорений кривошипно-ползунного механизма
План скоростей – это чертеж, выполненный в виде отрезков-векторов, показывающих скорость точек в данном положении механизма.
Последовательность построения планов скоростей и ускорений кривошипно-ползунного механизма (рис. 2.4) аналогична той, которая приведена в предыдущем случае. В дальнейшем некоторые подробности (расчёты масштабов, длин mе, масштабов планов скоростей mv и ускорений mа и т.д.) будут пропущены.
План скоростей кривошипно-ползунного механизманачинают строить после построения плана механизма в заданном положении, в выбранном масштабе длин mL, составления векторного уравнения скоростей и выбора масштаба плана скоростей mv.
Векторное уравнение скоростей шатуна 2 (рис. 2.4):

где VА = w1 LOA – скорость точки А, м/с; вектор этой скорости направлен перпендикулярно прямой ОА кривошипа 1 (рис. 2.4) на плане механизма; VВА – вектор скорости точки В относительно А; имеет направление, перпендикулярное прямой АВ на плане механизма; VВ – вектор полной (абсолютной), скорости ползуна 3; должен быть параллельным направлению движения ползуна.
Для построения плана скоростей сначала из полюса плана Рv (рис. 2.4) проводится вектор скорости точки А относительно О – VА, т.е. векторный отрезок Рva. Затем через точку апроводится перпендикуляр к прямой АВ плана механизма и через полюс Рv – прямая, параллельная движению ползуна 3. На пересечении этих двух прямых получается точка b. Направления векторов скоростей VВ иVВА обозначают стрелками.
Например, необходимо определить скорость точки S2, принадлежащей шатуну 2 и расположенной на середине отрезка АВ. Используя теорему подобия, на отрезке ab плана скоростей находят его середину (точка S2), которая, будучи соединенной с полюсом Рv, даст вектор VS2, изображающий абсолютную (полную) скорость точки S2.
 Рис. 2.4. Построение планов скоростей
Рис. 2.4. Построение планов скоростей
и ускорений кривошипно-ползунного механизма
Рассчитаем величину линейных скоростей и угловую скорость шатуна:
 , м/с,
, м/с,
 , м/с,
, м/с,
 , м/с,
, м/с,
 , с-1.
, с-1.
Направление вектора угловой скорости шатуна w2 определяется следующим образом. Вектор скорости VВА условно переносится в точку В плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлена угловая скорость w2 шатуна.
План ускорений кривошипно-ползунного механизма строят после того, как будет составлено векторное уравнение ускорений шатуна, учитывая, что он совершает сложное движение:
где аА – ускорение точки А; его величину и направление можно определить, используя векторное уравнение ускорения точки А относительно оси О вращения кривошипа:

причём ускорение точки А относительно О можно разложить на две составляющие – нормальное ускорение аnАО и тангенциальное аtАО, т.е.:
Так как точка О неподвижна и ускорение её равно нулю (аО= 0 и аtАО = 0 при условии, что угловая скорость вращения кривошипа постоянна: w1 = const и его угловое ускорение e1 = 0), то векторное уравнение ускорения точки А можно записать в виде:
Величина нормальной составляющей ускорения (нормальное ускорение) рассчитывается по формуле:

(его вектор направлен по радиусу вращения кривошипа от точки А к точке О).
Затем вычисляется нормальное ускорение точки В относительно А по формуле:

(его вектор направлен от В к А).
После выбора масштаба плана ускорений по формуле:

величина нормального ускорения anBA переводится этим масштабом в векторный отрезок длиной:
 , мм.
, мм.
Затем строится план ускорений (см. рис. 2.4). Из произвольно выбранного полюса Ра параллельно отрезку ОА плана механизма проводится вектор ускорения anAО, длина которого  была выбрана произвольно при расчёте масштаба mа. Из конца этого вектора (точки
была выбрана произвольно при расчёте масштаба mа. Из конца этого вектора (точки  ) проводится вектор ускорения anBA длиной
) проводится вектор ускорения anBA длиной  , который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой через полюс Ра параллельно линии движения ползуна 3. Полученная точка их пересечения b' определяет длины векторов ускорений aBA и aB.
, который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой через полюс Ра параллельно линии движения ползуна 3. Полученная точка их пересечения b' определяет длины векторов ускорений aBA и aB.
Для нахождения величины ускорения точки S2, принадлежащей шатуну, можно применить теорему подобия. При этом необходимо на векторе, изображающем на плане ускорений относительное ускорение aBA, найти соответствующую точку S2', делящую отрезок a'b' в той же пропорции, что и точка S2 делит отрезок АВ на плане механизма.
Угловое ускорение шатуна вычисляется по формуле:
 , с-1,
, с-1,
где n2b' – длина вектора на плане ускорений, изображающего тангенциальное ускорение а  .
.
Для определения направления вектора углового ускорения шатуна e2 необходимо вектор тангенциального ускорения а условно перенести в точку В плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и направлено ускорение e2 шатуна.
Планы скоростей и ускорений кулисного механизма
Чтобы построить план скоростей, необходимо составить векторное уравнение скоростей. При этом следует иметь в виду, что точка А1 (рис. 2.5), принадлежащая кривошипу 1, и точка А2, принадлежащая ползуну 2 и совпадающая на плане механизма с точкой А1, вращаются вокруг оси О с одинаковыми линейными и угловыми скоростями:
 иw1 = w2.
иw1 = w2.
Если задана величина w1, то величину линейной скорости рассчитывают по формуле:
 , м/с.
, м/с.
Векторы скоростей VА1 иVА2 направлены перпендикулярно радиусу ОА1. Скорость точки А3, принадлежащей кулисе 3, можно найти по векторному уравнению скоростей:
где VА3А2 – вектор скорости точки А3 кулисы относительно точки А2 ползуна, параллельный прямой А1В плана механизма.
Рис. 2.5. Построение планов скоростей и ускорений
кулисного механизма
После выбора масштаба плана скоростей mv (см. предыдущие примеры механизмов) строят план скоростей. Из полюса Рv (см. рис. 2.5) перпендикулярно отрезку ОА плана механизма проводится вектор скорости VА1, совпадающий с вектором скоростиVА2 (см. рис. 2.5, вектор  ). Через точку а1 проводят прямую, параллельную прямой А1В, а через полюс Рv – прямую, перпендикулярную А1В. На их пересечении получают точку а3 и наносят направление векторов (стрелки), руководствуясь векторным уравнением скоростей.
). Через точку а1 проводят прямую, параллельную прямой А1В, а через полюс Рv – прямую, перпендикулярную А1В. На их пересечении получают точку а3 и наносят направление векторов (стрелки), руководствуясь векторным уравнением скоростей.
Вычисляют величины скоростей:
 , м/с,
, м/с,
 , м/с,
, м/с,
где Рv a3 и а1 а3 – длины векторов, измеренные на плане скоростей.
Угловая скорость коромысла 3 вычисляется по формуле:
 ,с-1.
,с-1.
Для построения плана ускорений составляются векторные уравнения:


где аА2 – ускорение ползуна; а  – ускорение Кориолиса точки А3 относительно А2 (возникает тогда, когда есть относительное движение двух точек с одновременным вращением их вокруг какой-либо оси; в данном случае точка А3 движется относительно А2, вместе они вращаются вокруг неподвижной точки В; направление вектора а определяется так: необходимо условно повернуть вектор скорости VА3А2 по направлению вращения кулисы 3 – это и будет направление ускорения Кориолиса); а
– ускорение Кориолиса точки А3 относительно А2 (возникает тогда, когда есть относительное движение двух точек с одновременным вращением их вокруг какой-либо оси; в данном случае точка А3 движется относительно А2, вместе они вращаются вокруг неподвижной точки В; направление вектора а определяется так: необходимо условно повернуть вектор скорости VА3А2 по направлению вращения кулисы 3 – это и будет направление ускорения Кориолиса); а  – относительное ускорение точки А3 относительно А2 (его вектор параллелен А3В); аВ – ускорение точки В (аВ = 0, так как точка В неподвижна); а
– относительное ускорение точки А3 относительно А2 (его вектор параллелен А3В); аВ – ускорение точки В (аВ = 0, так как точка В неподвижна); а  – нормальное ускорение точки А3 относительно В (направление вектора от А3 к точке В); а
– нормальное ускорение точки А3 относительно В (направление вектора от А3 к точке В); а  – тангенциальное ускорение точки А3 относительно В (вектор направлен перпендикулярно А3В).
– тангенциальное ускорение точки А3 относительно В (вектор направлен перпендикулярно А3В).
Вычисление величины ускорения Кориолиса и нормальных ускорений можно произвести по формулам:
аА2 = а = w
= w  LОА, м/с2,
LОА, м/с2,
а = 2w3 VА3А2, м/с2,
= 2w3 VА3А2, м/с2,
а = w LА3В, м/с2.
= w LА3В, м/с2.
Масштаб плана ускорений выбирают, используя формулу:
 ,
,  ,
,
где Ра а'2 – длина вектора, изображающего ускорение аА2 на плане ускорений; она выбирается произвольно с таким расчётом, чтобы будущий план ускорений разместился на отведённом месте чертежа и масштаб был удобен для использования в дальнейших расчётах.
Остальные известные величины ускорений переводятся масштабом в векторные отрезки соответствующих длин:
 , мм;
, мм;  , мм.
, мм.
Затем строится план ускорений. Из произвольно выбранного полюса – точки Ра – проводится вектор ускорения а с длиной Раа'2. Из точки а'2 перпендикулярно А2В проводится вектор ускорения а с длиной a'2k. Через точку k проводится прямая, перпендикулярная этому вектору. Таким образом, будет выполнено графическое изображение первого векторного уравнения ускорений из двух, ранее составленных. Затем приступают к построению второго векторного уравнения. Из полюса Ра параллельно прямой А3В проводится вектор ускорения а длиной Ра n2, а через точку n2 – перпендикулярная ему прямая до пересечения с прямой, проведённой ранее через точку k. На пересечении этих прямых получается точка а'3. Вектор, соединяющий точки Ра и а'3, – полное ускорение аА3 точки А3.
Угловое ускорение кулисы вычисляется по формуле
 , с-2,
, с-2,
где n2a'3 – длина вектора, изображающего на плане ускорений тангенциальное ускорение точки А3.
Направление углового ускорения определяется, как и в предыдущем примере (для кривошипно-ползунного механизма), по направлению условного вращения кулисы 3 вектором ускорения а : условно перенести этот вектор в точку А3 плана механизма и посмотреть, в каком направлении он будет «вращать» кулису.
Дата добавления: 2021-12-14; просмотров: 780;
Поиск по сайту
Узнать еще
- I. ФУНКЦИИ ЦЕНТРАЛЬНОГО БАНКА.
- VI. ДВИЖЕНИЕ В ЦЕНТРАЛЬНОМ ПОЛЕ
- А) доступность до центра осознания различных логическнх уровней
- Автоматической централизации
- Алгоритмы централизованных систем противоаварийной автоматики на базе ЭВМ
- Аналог относительного ускорения точек звена
- Аналоги скоростей и ускорений
- Антенное поле приемного радиоцентра (приемной радиостанции)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
