Примечание. 1 – ведущее звено; 2 и 3 – звенья, образующие структурную группу.
Наиболее распространённые структурные группы 2-го класса подразделяются на 5 видов (модификаций) (табл.1.1)
Для определения класса механизма его расчленяют на структурные группы, начиная с конца механизма. За начало механизма принимают ведущее звено (начальный механизм).
От конца механизма отделяются поочерёдно простейшие структурные группы до тех пор, пока не останется лишь механизм 1-го класса (начальный механизм, их может быть несколько).
По классу структурных групп определяют класс механизма. Количество начальных механизмов равно величине W.
Пример расчленения плоского рычажного механизма на структурные группы показан на рис. 1.10. Предварительно вычисляют степень подвижности механизма W по формуле:
W = 3n – 2P5 – P4.
В данном случае W = 1, а это значит, что в механизме должны быть одно ведущее звено и соответственно один начальный механизм.
Рис. 1.10. Расчленение механизма
на структурные группы:
а – исходный механизм; б – начальный механизм;
в – 2-й класс, 1-й вид; г – 2-й класс, 2-й вид
В некоторых случаях при проектировании механизмов для повышения жёсткости конструкции, улучшения условий передачи сил вводятся так называемые избыточные (пассивные) связи(дополнительные звенья) (см рис. 1.11).
Рис. 1.11. Механизм с избыточной связью
В этом случае степень свободы вычисляется по формуле:
W = 3n – 2P5 + q = 3×4 - 2×6 + 1 = 1,
где q – число избыточных (пассивных) связей.
Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности, повышения механического коэффициента полезного действия механизма. Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3 для устранения трения (рис. 1.12).
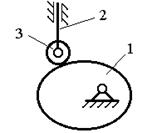
Рис. 1.12. Кулачковый механизм
с роликовым толкателем
В этом случае степень подвижности механизма, вычисленная по формуле Чебышева:
W = 3n – 2P5 – P4 = 3×3 – 2×3 – 1 = 2.
Здесь явно присутствует лишняя степень свободы, а именно вращение ролика под действием силы трения качения. Её следует учитывать при проведении структурного анализа данного механизма. Ведь очевидно, что данный механизм может функционировать и без ролика 3. Но при этом трение качения будет заменено трением скольжения между кулачком и толкателем (высшей кинематической парой), что увеличивает потери мощности в механизме на преодоление сил трения.
Тогда степень свободы такого механизма вычисляется по формуле:
W = 3n – 2P5 – P4 – q,
где q – количество лишних степеней свободы.
Дата добавления: 2021-12-14; просмотров: 493;
Поиск по сайту
Узнать еще
- XIII. факультативно анаэробные ГРАМОТРИЦАТЕЛЬНЫЕ НЕСПОРООБРАЗУЮЩИЕ ПАЛОЧКИ
- Анаэробные спорообразующие бактерии. Роды клостридиум (CLOSTRIDIUM) и десульфотомакулум (DESULFOTOMACULUM)
- Аэробные спрообразующие бактерии. Род бациллюс (BACILLUS)
- Буксирный трос; 2 – якорная скоба; 3 – удлиненное звено; 4 – якорная цепь; 5 – скоба; 6 – стальной трос (свистов); 7 – стопора якорной цепи.
- Глицин, цистеин и пролин как структурообразующие аминокислоты
- Затраты, образующие себестоимость продукции
- Звенья, кинематические пары и цепи
- Звенья, сочленения и их параметры

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
