Погрешности полунатурного моделирования
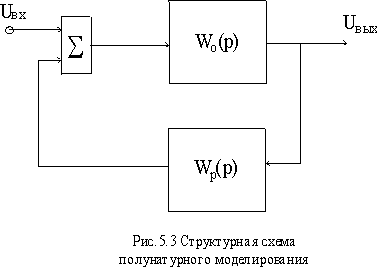
При полунатурном моделировании система управления замыкается через преобразующее устройство ,как показано на рис .2.3, где обозначено: Wo(p) – передаточная функция разомкнутой системы управления (вместе с объектом управления), Wp(p) – передаточная функция преобразующего устройства [Л5.1].?
Пусть
Wo(p) = B(p)/A(p), Wp(p) = (1+G(p))/(1+Q(p))
B(p) =  , A(p) =
, A(p) =  , an= 1 (2.3.1)
, an= 1 (2.3.1)
G(p) =  , Q(p) =
, Q(p) =  ,
,
При идеальном преобразующем устройстве , когда Wp(p) = 1, передаточная функция замкнутой системы имеет вид:
WI(p) = B(p)/[A(p) + B(p)] ,
а характеристическое уравнение
RI(p) = A(p) +B(p) =0 . (2.3.2)
Корни характеристического уравнения (23) будем считать известными и обозначим
pI1, pI2, …pIn (2.3.3)
Характеристическое уравнение передаточной функции преобразующего устройства, и его корни, в соответствии с (22), запишем:
Rp(p) = 1 + Q(p) = 0 ,
pp1, pp2…ppr (2.3.4)
Коэффициенты полинома Q(p) будем считать малыми, так, что модули корней (25) много больше модулей корней (24).В пределе, при Q(p) => 0,
limQ=>0[pIj] = 
Передаточная функция замкнутой системы (см.рис. 2.3.) с учетом преобразующего устройства и ее характеристическое уравнение имеют вид:
W(p) = B(p)(1 + Q(p))/[A(p)(1+Q(p))+B(p)(1+G(p))]
R(p) = [A(p)(1+Q(p))+B(p)(1+G(p))] = 0 (2.3.5)
Характеристическое уравнение (5) имеет n + r корней:
p1, p2…pn,pn+1…pn+r
Представляется очевидным, что при Q(p)  0 и G(p) 0 первые n корней уравнения (5) стремятся к корням уравнения (2), а последние r корней стремятся в бесконечность по отрицательной полуоси, как и корни уравнения (4).
0 и G(p) 0 первые n корней уравнения (5) стремятся к корням уравнения (2), а последние r корней стремятся в бесконечность по отрицательной полуоси, как и корни уравнения (4).
Это позволяет предположить, что характеристический полином R(p) (5) при малых Q(p) и G(p) незначительно отличается от произведения:
R1(p) = RI(p)Rp(p) (2.3.6)
Введем мало измененные полиномы R, входящие в (6):
RI(p) = RI(p) + d RI(p), Rp(p) = Rp(p) + d Rp(p), (2.3.7)
R1(p) = RI(p)Rp(p), dRI(p) = dA(p) + dB(p), dRp(p) = dQ(p)
Здесь
dA(p) =  , dB(p) =
, dB(p) =  ,
,
dQ(p) =  . (2.3.8)
. (2.3.8)
Величины dak…dqkявляются малыми приращениями соответствующих коэффициентов.
Приравняем теперь характеристический полином (5) измененному полиному (6):
R(p) = RI(p) , (2.3.9)
Подставив сюда выражения (7) для приращений полиномов, сокращая одинаковые слагаемые и пренебрегая произведениями малых приращений, получим:
dA +dB + QdB + AdQ +BdQ = - B(Q – G) (2.3.10)
Левая и правая части этого уравнения являются полиномами по p с наибольшей степенью pn+r. Для выполнения равенства (10) при любых p нужно приравнять коэффициенты при одинаковых степенях p в левой и правой частях уравнения, что даст n+r соотношений между приращениями dak, dbk, dqk. Количество этих приращений, в соответствии с выражениями (8), равно n+r+m+1. Следовательно, для выполнения равенства (10) можно задать произвольно m+1 приращение, что позволяет принять
dB = 0. Тогда соотношение (10) приобретет следующий вид:
(1 + Q)dA + (A + B)dQ = - B(Q – G) (2.3.11)
Система алгебраических уравнений , эквивалентная полиномиальному уравнению (11), - линейная и, в общем случае, неоднородная. Однако, при выполнении условий
Q(p) = G(p) , (2.3.12)
она станет однородной, т.е. будет иметь тривиальное нулевое решение dA(p) = 0, dQ(p) = 0. Этот результат становится очевидным, если вспомнить, что при выполнении условий (12) передаточная функция преобразующего устройства
Wp(p) = 1, что видно из (1).
Другой способ решения уравнения (11) исходит из того, что для обеспечения равенства двух полиномов степени (n+r) достаточно обеспечить их равенство в (n+r) точках по аргументу p. Для p , равных корням (3) уравнения(2), соотношение (11) приобретает вид:
dA(pIj)(1 + Q(pIj)) = -B(pIj)(Q(pIj) – G(pIj)); j = 1…n (2.3.13)
С учетом обозначений (7), систему уравнений (13) можно записать:
da0+ da1pIj+…dan-1pIjn-1= (2.3.14)
= -{ B(pIj)(Q(pIj) – G(pIj))}/ (1 + Q(pIj)); j = 1…n
Решение системы уравнений (14) дает приращения коэффициентов полинома A(p) и , в силу соотношения dB = 0, приращения коэффициентов полинома RI(p) = 0 (2).
Зная приращения коэффициентов полинома (2), можно вычислить приращения его корней по соотношениям (2.2.8).
Сравнивая (2.2.8) с (14) можно видеть, что в них входят одинаковые комбинации приращений коэффициентов, поэтому не нужно решать (14) относительно dak, а можно сразу вычислять приращения основных корней системы по формуле
dpIj= {B(pIj)(Q(pIj) – G(pIj))}/ (1 + Q(pIj))(pIj- pI1)*
*(pIj- pI2)… (pIj- pIn) , j = 1…n (2.3.15)
Подставив в (11) корни (4), получим:
dQ(ppj)[A(ppj) + B(ppj)] = -B(ppj)(Q(ppj) – G(ppj));
j = 1…r (2.3.16)
Проведя аналогичные предыдущим рассуждения и выкладки, получим приращения остальных корней:
dppj= B(ppj)(Q(ppj) – G(ppj))/ [A(ppj) + B(ppj)]*
*(ppj– pp1) … (pIj- pIn); j = 1…r (2.3.17)
Итак, включение в моделирующий комплекс динамического преобразующего устройства приводит к тому, что характеристическое уравнение модели имеет две группы корней: основные - мало измененные корни уравнений идеальной системы, и дополнительные - мало измененные корни характеристического уравнения преобразующего устройства.
Задавая допустимое смещение основных корней, а также допустимое сближение основной и дополнительной групп, можно предъявить требования к быстродействию преобразующего устройства.
Упражнения
Колебательное звено без затухания описывается дифференциальным уравнением:
 (3.1)
(3.1)
При идеальном выполнении математических операций такое звено совершает незатухающие гармонические колебания с частотой w. Использование вычислительной техники для моделирования такого звена может привести к затухающим или раскачивающимся колебаниям с измененной частотой. Изменение частоты и декремент затухания (раскачки) при моделировании могут являться мерой погрешности выполнения математических операций.
Определить теоретически погрешность по частоте и декремент затухания (раскачки) в зависимости от шага интегрирования для первых четырех порядков метода рядов Тейлора.
Решить уравнение (3.1) методами Рунге – Кутта первых четырех порядков. Определить фактическую частоту и декремент затухания (раскачки), сравнить с результатами п.1).
Произвести предварительную коррекцию уравнения (3.1), определить теоретические значения частоты и затухания (раскачки).
Решить скорректированное уравнение (3.1) методами Рунге – Кутта первых четырех порядков, сравнить с результатами п.3).
Вычислить смещение корней уравнения (3.1) при аналоговом моделировании с передаточной функцией интегратора (2.2.15). Найти границу по моделируемой частоте w , отделяющую затухание от раскачки.
Промоделировать уравнение (3.1) на аналоговой модели, сравить с результатами п.5).
Включить в схему моделирования уравнения (3.1) преобразующее устройство с передаточной функцией
W(p) = 1/(1+Tp)
Вычислить изменение частоты и декремент раскачки. Предъявить требования к допустимому значению T в зависимости от w.
Литература
Л5.1. Боевкин В.И. Оценка точности математического моделирования динамических систем. – М.: Изд. МГТУ, 1990. – 54 с.
Л5.2. Калиткин Н.Н. Численные методы. – М.: Наука, 1978. – 512 с.
Л5.3. Форсайт Дж., Малькольм М., Моулер К. Машинные методы математических вычислений. - М .: Мир, 1980. – 279 с.
Л5.4. Беки Дж., Карплюс У. Теория и применение гибридных вычислительных систем. – М.: Мир, 1970. – 483 с.
Л5.5 Боевкин В.И., Багдамян О. Н. Оценка точности решения задачи Коши по смещению корней характеристического уравнения. – Труды №474. – М.: МВТУ, 1987. – 82 с.
Л5.6 Стренг Г. Линейная алгебра и ее применения. – М. : Мир, 1980. - 454 с.
Л5.7. Анисимов В.В., Голубкин В. Н. Аналоговые вычислительные машины. – М.: Высш. школа, 1971. – 447 с.
Л5.8. Боевкин В.И., Айнутдинова И. Н., Кучминская А.И. Чувствительность динамических свойств линейной системы к изменению ее параметров. – Труды № 284 . – М.: МВТУ, 1979. – 170 с.
Л5.9. Боевкин В.И. Моделирование при испытаниях автоматических информационных устройств. – М.: МВТУ, 1985. – 72 с.
Дата добавления: 2021-10-28; просмотров: 576;
Поиск по сайту
Узнать еще
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- А. Возникновение и эволюция глобального моделирования
- А. Классификация видов моделирования (Л.5)
- Абсолютная и относительная погрешности
- Абсолютные и относительные погрешности
- Алгоритм моделирования по принципу особых состояний.
- Алгоритм моделирования процесса управления комплексной информатизацией образовательных систем на основе функционального подхода
- Алгоритм моделирования системы электропривода по методу структурных схем

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
