Оптимальная фильтрация случайного сигнала
Более сложной и общей, чем задача оценивания постоянного параметра, является задача оценивания изменяющегося сообщения (первичного сигнала) на основе наблюдаемой реализации. Такое оценивание принято называть фильтрацией.
Сообщение рассматривается как реализация случайного процесса, множество всевозможных сообщений – как ансамбль реализаций с некоторым вероятностным распределением. Сообщение (первичный сигнал) модулирует несущее колебание, поэтому сигнал на выходе канала связи также случаен. Таким образом, ставится задача по наблюдаемому случайному колебанию оценить другое случайное колебание (первичный сигнал, или закон модуляции), связанное с наблюдаемым в общем случае нелинейным образом (задача нелинейной фильтрации, или демодуляции). Эта задача может быть весьма сложной.
В этом подразделе рассматривается наиболее простой случай оптимальной линейной фильтрации.
Пусть сигнал на входе линейного фильтра представляет собой сумму переданного сигнала S(t) и помехи ξ(t)
x(t) = S(t) + ξ(t).
Требуется найти такую передаточную характеристику K(ω), которая минимизирует средний квадрат погрешности
 , (18.8)
, (18.8)
где  – оценка сигнала на выходе фильтра. Здесь, считаем, что время запаздывания сигнала
– оценка сигнала на выходе фильтра. Здесь, считаем, что время запаздывания сигнала  в фильтре τz = 0, а среднее значение берется по ансамблям сигналов S(t) и помех ξ(t). Считаем также, что S(t) и ξ(t) стационарные взаимно-некоррелированные процессы с известными спектрами плотности мощности Gs(ω) и Gξ(ω). Для отклика сигнала на выходе фильтра запишем
в фильтре τz = 0, а среднее значение берется по ансамблям сигналов S(t) и помех ξ(t). Считаем также, что S(t) и ξ(t) стационарные взаимно-некоррелированные процессы с известными спектрами плотности мощности Gs(ω) и Gξ(ω). Для отклика сигнала на выходе фильтра запишем
y(t) = L[S(t) + ξ(t)],
где L[-] – оператор линейного преобразования.
Среднеквадратическую погрешность (18.8) можно представить двумя составляющими
 ,
,
где  – составляющая, обусловленная искажениями сигнала в фильтре (считаем ФЧХ линейной, т.е. φ(ω) = -ωτz);
– составляющая, обусловленная искажениями сигнала в фильтре (считаем ФЧХ линейной, т.е. φ(ω) = -ωτz);  –составляющая, обусловленная действием шума.
–составляющая, обусловленная действием шума.
Принимая во внимание, что
 ,
,
для спектральной плотности мощности  имеем
имеем
 .
.
В свою очередь, спектральная плотность мощности составляющей шума равна  а для Gε(ω) суммарной погрешности получим
а для Gε(ω) суммарной погрешности получим
 . (18.9)
. (18.9)
Найдем теперь выражение K(ω) – при котором суммарная погрешность становится минимальной:
 ,
,
откуда
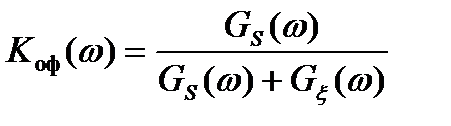 , (18.10)
, (18.10)
или
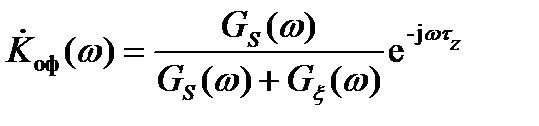 . (18.11)
. (18.11)
Фильтр (18.11), обеспечивающий минимальную среднеквадратичную погрешность случайного сигнала на фоне белого шума называется оптимальным фильтром Колмогорова-Винера. Следует отметить, что фильтр Колмогорова-Винера с коэффициентом передачи (18.11) физически не реализуем.
Конструктивные результаты в решении задачи синтеза фильтра, оптимального по критерию минимума СКП получил Р. Э. Калман, который в качестве априорных данных о сообщении использовал рекуррентную модель: состояние – наблюдение. Предполагается, что сообщение a(t) порождается линейным стохастическим дифференциальным уравнением состояния
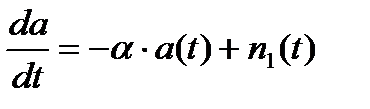 , (18.12)
, (18.12)
где n1(t) – нормальный белый шум (порождающий процесс). Физически это означает, что сообщение a(t) моделируется как результат прохождения белого шума через интегрирующую цепь с постоянной времени α = 1/RС.
Рассмотрим случай линейной фильтрации, когда наблюдаемый процесс на входе фильтра задан уравнением наблюдения
x(t) = S(t, a(t)) + ξ(t) = a(t) f(t) + ξ(t),
где сообщение a(t) – задано уравнением (18.12); S(t, a(t)) – сигнал; f(t) – носитель; ξ(t) – белый гауссовский шум.
Принимая во внимание основное условие линейной оптимальной фильтрации, состоящее в том, чтоб ошибка  должна быть не коррелированна со входным сигналом x(t), рекурентное соотношение, имеет вид:
должна быть не коррелированна со входным сигналом x(t), рекурентное соотношение, имеет вид:
 (18.13)
(18.13)
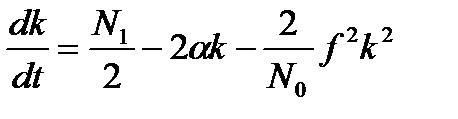 (18.14)
(18.14)
Уравнения (18.13) и (18.14) принято называть уравнениями фильтра Калмана. Уравнение (18.13) определяет алгоритм формирования оценки, а, следовательно, и структурную схему фильтра, а (18.14) – ошибку фильтрации  .
.
Структурная схема, моделирующая уравнение (18.13) приведена на рисунке 18.4. Этот фильтр представляет собой динамическую систему с переменным коэффициентом усиления, величина которого зависит от точности текущих оценок (дисперсии погрешности фильтрации) и уровня шумов наблюдения. Иначе говоря, фильтр Калмана можно рассматривать как линейную следящую систему, эффективная полоса пропускания которой, изменяется в процессе работы.
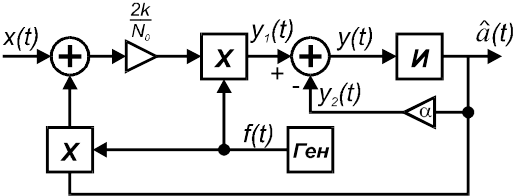
Рис. 18.4. Структурная схема, моделирующая уравнение 18.13
Дата добавления: 2017-10-04; просмотров: 1939;
Поиск по сайту
Узнать еще
- Автокорреляция вещественного сигнала
- Автокорреляция дискретного сигнала
- АКФ дискретного сигнала
- Алгоритм оптимального приёма при полностью известных сигналах. Когерентный приём
- Аналитический сигнал как источник информации о качественном и количественном составе вещества. Классификация методов химического анализа по характеру аналитического сигнала.
- Аппаратурная реализация разложения сигнала
- Б. Анализ схемы в режиме усиления сигнала.
- Б. Анализ схемы в режиме усиления сигнала.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
