Некоторые сведения о механизмах
Законы и методы теоретической механики находят свое практическое приложение прежде всего в теории механизмов, так как механизмы являются кинематической основой всех машин, механических приборов и промышленных роботов.
Основные определения теории механизмов и машин изложены в § 9.2 настоящей книги, из которого видно, что кинематические пары и цепи могут быть плоскими и пространственными. Звенья плоских механизмов совершают плоскопараллельное движение.
Основные плоские механизмы с низшими парами.Как известно из § 9.2, звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары).
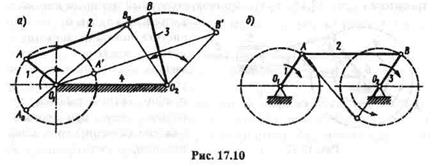
Основным типом плоского механизма является шарнирный четырехзвенник, принципиальная схема которого изображена на рис. 17.10, а. В этом механизме четыре вращательные кинематические пары и четыре звена: 1 — кривошип, 2 — шатун, 3 — коромысло, 4 — стойка. Такой механизм называется кривошипно-коромыеловым и является однокривошшшым; крайние положения звеньев показаны на рисунке.
|
Кривошипно-коромысловый механизм встречается в металлорежущих станках, прессах, ковочных, полиграфических, сельскохозяйственных и других машинах, а также во многих приборах.

|
Если стойка шарнирного четырехзвенника самое короткое звено или если звенья 1 и 3 равной длины, то механизм становится двухкри-вошипным, так как звено 3 так же, как и кривошип 1,получит возможность совершать полный оборот.
На рис. 17.10, б показана схема двухкривошипного механизма, который называется шарнирным параллелограммом; у такого механизма оба кривошипа вращаются в одном направлении с одинаковой угловой скоростью, а шатун 2 движется поступательно. Шарнирный параллелограмм применяется, например, в локомотивах в качестве спарника, передающего вращение ведомым колесам, или в механизме чертежного приспособления, изображенного на рис. 10.2. На рис. 17.10, б тонкими линиями показан шарнирный антипараллелограмм, кривошипы которого вращаются в противоположных направлениях.
На рис. 17.11 показаны схемы применения шарнирного четырехзвенника в тестосмесительпой машине (а)и машине для ворошения сена (б).
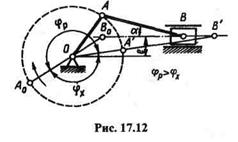
Если в шарнирном четырехзвеннике преобразовать одну вращательную пару в поступательную, то получится широко распространенный кривошипно-ползунный механизм (см. рис. 9.1). Такой механизм является центральным, так как ось ползуна пересекает ось кривошипа. Если ось ползуна смещена от оси кривошипа на величину эксцентриситета е (рис. 17.12), то кривошипно-ползунный механизм называется
|
нецентральным. На этом рисунке показаны тонкими линиями крайние положения звеньев механизма и видно, что угол поворота кривошипа при прямом (обычно рабочем) ходе больше, чем при обратном (обычно холостом) ходе. Следовательно, в нецентральном ме-

|
ханизме холостой ход совершается с большей скоростью, чем рабочий.
За счет эксцентриситета угол давления  шатуна на ползун (а следовательно, и давление ползуна на направляющие) во время рабочего хода будет меньше, чем при холостом. Это благоприятно сказывается на КПД и долговечности машины, так как обычно нагрузка на механизм при рабочем ходе значительно больше, чем при холостом.
шатуна на ползун (а следовательно, и давление ползуна на направляющие) во время рабочего хода будет меньше, чем при холостом. Это благоприятно сказывается на КПД и долговечности машины, так как обычно нагрузка на механизм при рабочем ходе значительно больше, чем при холостом.
На рис. 9.4 показана схема четырехзвенного кривошипно-кулисного механизма с поступательно движущейся кулисой. Этот механизм преобразует вращательное движение кривошипа ОМ в возвратно-поступательное движение кулисы с помощью камня кулисы М,шарнирно соединенного с пальцем кривошипа.
На рис. 17.13 изображена схема шестизвенного кривошипно-кулисного механизма, применяемого, например, в поперечно-строгальных станках. Такой механизм преобразует непрерывное вращательное движение кривошипа ОА в возвратно-поступательное движение ползуна М с помощью качающейся кулисы О'В и поступательно движущейся кулисы MB.Из рисунка видно, что угол поворота кривошипа при рабочем ходе ползуна заметно больше, чем при холостом, следовательно, скорость рабочего хода будет меньше скорости холостого хода.
Скорость движения ползуна М при любом положении механизма легко определяется с помощью теоремы о сложении скоростей, согласно которой абсолютная скорость точки равна векторной сумме относительной и переносной скоростей. Прямоугольники скоростей точек А и В показаны на рисунке.
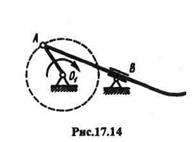
На рис. 17.14 представлена схема кулисного кривошипно-коромыс-лового механизма с качающимся ползуном. Такой механизм применяется, например, в снегоуборочных машинах.
Некоторые механизмы с высшими парами.Как нам известно, звенья высших пар соприкасаются по линиям и точкам. Высшие кинематические пары имеются, например, в механизмах прерывистого движения и кулачковых механизмах.
|
|
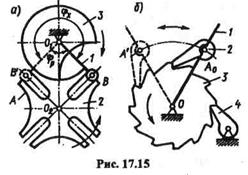
На рис. 17.15, а изображен мальтийский механизм, преобразующий непрерывное вращение ведущего звена — кривошипа 1 с пальцем или роликом В на конце в прерывистое вращение ведомого звена — мальтийского креста 2, имеющего радиальные пазы (название механизма возникло от сходства ведомого звена с эмблемой духовно-рыцарского Мальтийского ордена).
Вращение мальтийского креста происходит при повороте кривошипа на угол  р; остальная часть оборота кривошипа на угол х соответствует остановке ведомого звена 2. Неподвижное положение мальтийского креста фиксируется его сегментными вырезами А,по которым скользит диск 3,жестко связанный с кривошипом 1.
р; остальная часть оборота кривошипа на угол х соответствует остановке ведомого звена 2. Неподвижное положение мальтийского креста фиксируется его сегментными вырезами А,по которым скользит диск 3,жестко связанный с кривошипом 1.
Число пазов мальтийского креста бывает в пределах от 3 до 12. При бесконечно большом числе пазов и радиусе мальтийский крест превра-гится в рейку, которая будет совершать поступательное движение.
На указанном рисунке изображен мальтийский механизм внешнего зацепления, когда ведущее и ведомое звенья вращаются в противоположных направлениях. Для передачи вращения в одном направлении применяют механизмы с внутренним зацеплением.
Мальтийские механизмы применяют в металлообрабатывающих станках, пишущих машинах, кинопроекционных аппаратах и приборах
точной механики.
На рис. 17.15, б показан один из видов храпового механизма. Такой механизм преобразует возвратно-качательное движение ведущего звена — рычага 1 с рабочей собачкой 2 в прерывистое одностороннее вращательное движение ведомого звена 3, называемое храповым колесом. При вращении рычага и рабочей собачки в исходное положение храповое колесо остается неподвижным. Дня предотвращения его поворота в обратном направлении предусмотрена стопорная собачка 4.
При бесконечно большом числе зубьев храпового колеса оно превратится в рейку, которая будет совершать прерывистое поступательное движение.
Храповые механизмы применяют, например, в грузоподъемных машинах, механизмах подачи автоматических линий, механизмах завода пружин, пишущих машинах и др.
В технике весьма широкое применение имеют кулачковые механизмы, с помощью которых можно осуществить почти любой заранее заданный закон движения ведомого звена.
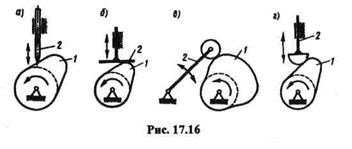
Простейший кулачковый механизм —трехзвенный (рис. 17.16) состоит из кулачка 1, толкателя 2 и стойки. Механизм преобразует вращательное движение кулачка в возвратно-поступательное или качательное движение толкателя. На рисунке показаны плоские кулачковые механизмы с толкателями различной конструкции: игольчатым (а), тарельчатым (б), роликовым (в) и сферическим (г).
Существуют механизмы с поступательно движущимися кулачками; такие кулачки называют копирами.
Кулачковые механизмы применяют, например, в двигателях внутреннего сгорания, металлорежущих станках, приборостроении и т. д.
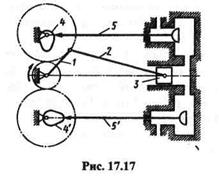
На рис. 17.17 показана сложная разветвленная кинематическая цепь одноцилиндрового двигателя внутреннего сгорания. Цепь состоит из криво-шипно-ползунного механизма 1—2—3 и двух кулачковых механизмов 4—5 клапанного газораспределения. Коленчатый вал (кривошип 1) и распределительный вал с кулачками 4 связаны между собой зубчатыми колесами.
|
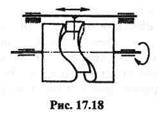
Все рассмотренные ранее механизмы являются плоскими. На рис. 17.18 изображена схема пространственного кулачкового механизма с цилиндрическим кулачком (барабаном). Такой механизм применяется, например, в металлорежущих автоматах и полуавтоматах.
Дата добавления: 2021-09-07; просмотров: 542;
Поиск по сайту
Узнать еще
- II. СВЕДЕНИЯ О ВОИНСКОМ УЧЕТЕ
- АДСОРБЦИЯ. Общие сведения
- Анатомо-физиологические основы массажа. Общие сведения о строении скелета
- Архитектурно-строительная часть. Общие сведения
- Архитектурные обмеры. Общие сведения
- Более подробные сведения по этим вопросам можно найти в учебниках по невропатологии для педагогических и медицинских вузов.
- В. Сведения о предстоящем выпуске ценных бумаг
- Вводные сведения о землетрясении.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
