Устройство системы управления
Сигнал USa кислородного датчика. За (рис. 5), установленного до каталитического нейтрализатора предварительной очистки
4, принимается электронным блоком управления двигателя 7. Для этого может использоваться или узкополосный, или широкополосный (постоянного действия) кислородный датчик. Второй кислородный датчик может быть установлен за основным каталитическим нейтрализатором
5. Этот датчик, который всегда должен быть узкополосным, генерирует сигнал Usb. Таким образом, имеет место форма управления с двумя кислородными датчиками.
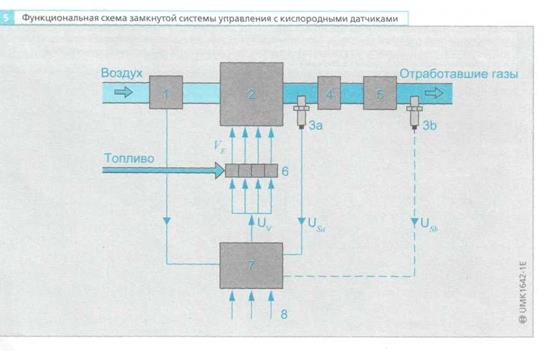
Рис.5
1 Массовый расходомер воздуха
2 Двигатель
3а Кислородный датчик, установленный до предварительного каталитического нейтрализатора (узкополосный или широкополосный датчик)
3b Узкополосный кислородный датчик, установленный после основного каталитического нейтрализатора (только при необходимости; на двигателях с непосредственным впрыском бензина интегрируется сдатчиком N0,)
4 Предварительный трёхкомпонентный каталитический нейтрализатор
5 Основной каталитический нейтрализатор (на двигателях с впрыском топлива во впускной
коллектор – трёхкомпонентный каталитический нейтрализатор; на двигателях с непосредствен
ным впрыском бензина - каталитический нейтрализатор N0 аккумуляторного типа)
6 Форсунки
7 Электронный блок управления двигателя (ECU)
8 Входные сигналы
Us Сигнал напряжения кислородного датчика
Uv Пусковой сигнал напряжения на форсунках l/f Количество впрыскиваемого топлива
Принцип действия
При использовании замкнутой системы управления с кислородным датчиком отклонение от заданного состава топливовоздушной смеси всегда может быть определено и скорректировано. Принцип управления основан на измерении содержания остаточного кислорода в отработавших газах, что является мерой состава топливовоздушной смеси, поступающей в двигатель 2.
Двухступенчатое управление Сигнал напряжения USa, генерируемый узкополосным кислородным датчиком, установленным до каталитического нейтрализатора 4 («pre-cat»), является высоким в зоне богатой рабочей смеси (X < 1) и низким в зоне бедной смеси (X > 1). Поскольку резкое изменение величины напряжения происходит при X = 1, то узкополосный кислородный датчик может только показывать, какая топливовоздушная смесь имеет место в данный момент.
Выходной сигнал датчика в электронном блоке управления двигателя преобразуется в двоичный сигнал и используется как входной сигнал замкнутого контура управления с кислородным датчиком в установленном программном обеспечении. Система управления с кислородным датчиком (датчиками) оказывает непосредственное влияние на формирование топливовоздушной смеси и устанавливает правильное отношение воздух/топливо путём адаптации количества впрыскиваемого топлива. Регулируемая переменная может изменяться скачком или по линейному закону, и направление управления изменяется с каждым скачком напряжения датчика. Другими словами, скачок регулируемой переменной вызывает изменение состава топливовоздушной смеси. Сначала это изменение является очень резким, а затем переходит в режим линейного изменения. При высоком сигнале напряжения (богатая топливовоздушная смесь) направление регулирования происходит в «бедную» сторону, а при низком сигнале напряжения - в «богатую». Это так называемое двухступенчатое управление позволяет замкнутому контуру управления с обратной связью поддерживать состав топливовоздушной смеси близко к стехиометрическому соотношению (X = 1).
Формирование характеристической кривой регулируемой переменной позволяет асимметрично компенсировать типичный ошибочный сигнал кислородного датчика, вызванный изменениями состава топливовоздушной смеси («богатое»/»бедное» переключение).
Дата добавления: 2017-09-01; просмотров: 1359;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
