Общая задача нелинейного программирования.
В самом широком смысле общая задача нелинейного программирования заключается в отыскании экстремума целевой функции при заданных ограничениях в виде равенств и/или неравенств. Ограничения могут быть линейными и/или нелинейными. Однако общепринята несколько более узкая постановка общей задачи нелинейного программирования, в которой исключаются из рассмотрения следующие специальные случаи:
1. Переменные принимают лишь целочисленные значения (нелинейное целочисленное программирование).
2. Ограничения включают в качестве параметра время, при этом используются дифференциальные уравнения (оптимальное управление, динамическая оптимизация).
Пусть непрерывная функция f(x) представляет собой целевую функцию; h1(X),... hm(X) задают ограничения в виде равенств, а gm+1(X),...gp(X) — ограничения в виде неравенств, где X = {x1,… хп}T- вектор-столбец компонентов x1,…хп в n-мерном евклидовом пространстве En.
Как и в линейном программировании, переменные х1,...хп могут быть конструктивными параметрами, установками регулятора, показаниями измерительных приборов и т.д., тогда как целевая функция может представлять собой стоимость, вес, годовой доход и т.п., а ограничения - технические требования, условия работы, пропускную способность или факторы безопасности, присущие данному процессу.
Формально задача нелинейного программирования может быть сформулирована следующим образом:
минимизировать  (9)
(9)
при m линейных и/или нелинейных ограничениях в виде равенств
 (10)
(10)
и (р - т) линейных и (или) нелинейных ограничениях в виде неравенств
 (11)
(11)
Хотя в некоторых частных случаях ограничения в виде равенств могут быть явно разрешены относительно выбранных переменных, которые затем исключаются из задачи как независимые переменные, и в задаче остаются только ограничения в виде неравенств, чаще всего ограничения в виде равенств не могут быть явно разрешены и потому сохраняются.
Иногда встречается другое представление выражений (9) - (11):
минимизировать  (12)
(12)
где R - область пространства переменной X, для которой выполнены условия (10) и (11), например:
 (13)
(13)
В выражениях (12) и (13) знак | читается как «при», а символ Î означает «принадлежит». Знак неравенства в выражении gj(X) ³ 0 может быть изменен на обратный путем умножения на (-1), что не изменит математической постановки задачи.
В качестве простого примера задачи нелинейного программирования, которую можно проиллюстрировать графически, приведем следующую:
минимизировать f(X) = х12 + x22 + 2х2
при ограничениях
h1(X) = х12 + x22 – 1 = 0;
g2(X) = x1 + 2x2 – 0.5 ³ 0;
g3(X) = x1 ³ 0;
g4(X) = x2 ³ 0.
На рис. 5 целевая функция изображена пунктирными линиями, ограничение в виде равенства - жирной сплошной кривой, а граница допустимой области, определяемой неравенствами, - линиями со штриховкой, нанесённой с внутренней стороны области.
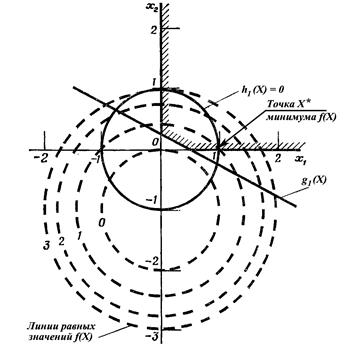
Рис.5. Топография целевой функции и ограничений
В каждой точке n-мерного пространства переменных [х1, х2,... хп ] функция f(X) имеет определённое значение, и, следовательно, это n-мерное пространство представляет собой скалярное поле для критерия оптимальности. Как показано на рис.5, в этом пространстве можно вычертить семейство линий равных значений (эквипотенциальных гиперповерхностей) для выбранных значений функции f(X).
Пространство переменных [х1, х2,... хп ] является также скалярным полем для функций ограничений, для которых также можно изобразить графически эквипотенциальные гиперповерхности. При помощи классических методов анализа в общем случае невозможно заранее выявить расположение точки X*, которая соответствует минимальному (или максимальному) значению функции f(X), поскольку она может находиться на пересечении ограничивающих поверхностей или между ними.
Задачи линейного и квадратичного программирования могут рассматриваться как два частных случая общей задачи нелинейного программирования. Если и функция (9), и уравнения (10), и неравенства (11) линейны, то мы имеем дело с задачей линейного программирования. Если же целевая функция квадратичная, а ограничения линейные, то имеет место задача квадратичного программирования:
минимизировать  (14)
(14)
при ограничениях
 (15)
(15)
 (16)
(16)
где Q - положительно определенная или неотрицательно определенная квадратная симметрическая матрица; а и b - матрицы коэффициентов, определение которых дано ранее в связи с уравнением (7). Иногда в задачу квадратичного программирования включают линейные ограничения в виде равенств
 (17)
(17)
Во всех трех классах задач - нелинейных, линейных и квадратичных - нужно найти вектор X* = {х1, х2,... хп }T, минимизирующий или, наоборот, максимизирующий функцию f(X) при следующих условиях:  и
и 
Основные понятия теории оптимизации.
Дата добавления: 2021-07-22; просмотров: 755;
Поиск по сайту
Узнать еще
- I. Общая характеристика категории состояния как часть речи
- II. Лексико-грамматические разряды местоимений. Их общая характеристика
- IV. ОБЩАЯ ХАРАКТЕРИСТИКА ВИРУСОВ
- N-канальная СМО с отказами (задача Эрланга)
- XXIII. ОБЩАЯ ХАРАКТЕРИСТИКА
- А. Общая характеристика
- Анализ целевых сценариев в организационных задачах судостроения
- Анатомии домашних. Общая характеристика аппарата пищеварения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
