Суммарная инерционная девиация
На практике в двухгироскопных компасах, снабженных гидравлическим успокоителем колебаний, обе рассмотренные девиации существуют одновременно, складываясь в общую суммарную инерционную девиацию. Величина этой девиации зависит от параметров ГК, широты места судна, значения расчетной широты и параметров маневра. Аналитические зависимости, описывающие закон изменения рассматриваемой девиации достаточно громоздки и практически неприемлемы для оценки ее текущего значения вахтенным помощником капитана без привлечения вычислительной техники и информации о параметрах маневра. Однако ему необходимо иметь представление об особенностях проявления указанной девиации и, если в ГК отсутствуют устройства для ее компенсации, уметь снизить ее негативное влияние до минимума.
 На рис. 2.16 приведены кривые, рассчитанные на ЭВМ для параметров, соответствующих гирокомпасу “Курс-4”, которые характеризуют закон изменения суммарной инерционной девиации при равноускоренных маневрах длительностью 60 и 360 секунд, произведенных в различных широтах. Равноускоренное движение представляло собой набор скорости от нуля до 25 узлов при неизменном курсе судна, равном 1800. Указанные кривые и основные выводы, полученные в результате их анализа, заимствованы из учебника [13]. Несмотря на то, что эти кривые приведены для сугубо частных случаев движения судна, результаты их анализа, носят достаточно общий характер и могут быть использованы в большинстве практических случаев. Всего на упомянутом рисунке представлены: четыре графика суммарной инерционной девиации, определяющие закон ее изменения во времени при манерах в широтах ниже расчетной; два графика для расчетной широты, равной 600; и два графика для широт, которые выше расчетной. Сравнивая эти графики между собой можно придти к следующим выводам:
На рис. 2.16 приведены кривые, рассчитанные на ЭВМ для параметров, соответствующих гирокомпасу “Курс-4”, которые характеризуют закон изменения суммарной инерционной девиации при равноускоренных маневрах длительностью 60 и 360 секунд, произведенных в различных широтах. Равноускоренное движение представляло собой набор скорости от нуля до 25 узлов при неизменном курсе судна, равном 1800. Указанные кривые и основные выводы, полученные в результате их анализа, заимствованы из учебника [13]. Несмотря на то, что эти кривые приведены для сугубо частных случаев движения судна, результаты их анализа, носят достаточно общий характер и могут быть использованы в большинстве практических случаев. Всего на упомянутом рисунке представлены: четыре графика суммарной инерционной девиации, определяющие закон ее изменения во времени при манерах в широтах ниже расчетной; два графика для расчетной широты, равной 600; и два графика для широт, которые выше расчетной. Сравнивая эти графики между собой можно придти к следующим выводам:
· Значение первого максимума девиации сильно зависит от широты места маневра. Указанное значение уменьшается по мере приближения широты места судна к расчетной. В расчетной широте девиация меняет свой знак и в сильной степени возрастает в широтах, которые выше расчетной;
· В диапазоне широт от φ =0° до φ*=60° значение первого максимума девиации в значительной степени зависит от продолжительности маневра.
· Чем маневр длительнее, тем меньше значение первого максимума. В диапазоне широт, лежащих выше расчетной, значение первого максимума девиации практически не зависит от продолжительности маневра.
· С увеличением широты места маневра в диапазоне широт от φ =0° до φ*=60° знак первого максимума девиации остается неизменным. В расчетной широте φ* и выше знак первого максимума меняется на противоположный.
· Нарастание значения девиации в течение времени маневра от 0 до момента t1 его окончания происходит практически по линейному закону.
· Значение второго максимума девиации в любой широте места маневра практически не зависит от его длительности.
· Значение второго максимума девиации в диапазоне широт от φ =0° до φ <φ* практически не зависит от широты места. В диапазоне широт выше расчетной значение второго максимума в сильной степени возрастает с увеличением широты места.
· Возможен перерасчет значения девиации для случая равноускоренного движения на иное значение ускорения, чем принятое для расчета графиков, аналогичных приведенным на рис. 2.16, но только для какого-либо одного из фиксированных значений длительности маневра. Для перерасчета можно использовать следующую формулу:
 (2.46)
(2.46)
где  - значение девиации, взятое на интересующий момент времени из имеющейся таблицы или графика, построенного для маневра, в результате которого северная составляющая скорости судна изменилась на величину
- значение девиации, взятое на интересующий момент времени из имеющейся таблицы или графика, построенного для маневра, в результате которого северная составляющая скорости судна изменилась на величину  ,
,  - изменение северной составляющей скорости судна в результате проведенного вами маневра.
- изменение северной составляющей скорости судна в результате проведенного вами маневра.
Особого внимания заслуживает рассмотрение влияния повторных маневров на показания гирокомпаса. Как и в предыдущем случае, затрагивая эту тему, воспользуемся хорошо изложенным материалом, касающимся данного вопроса, в учебнике [13].
Существенное значение при анализе влияния повторных маневров на величину суммарной инерционной девиации имеет явление «наследственности» колебаний гирокомпаса, открытое акад. А. Н. Крыловым (1863—1945). Суть этого явления состоит в следующем. Если судно совершает ряд маневров, следующих один за другим через интервалы времени, меньшие, чем это необходимо для того, чтобы девиация  от каждого предыдущего маневра практически исчезла до начала следующего, то чувствительный элемент гирокомпаса как бы «запоминает» девиацию от каждого отдельного маневра и полностью ее воспроизводит во времени одновременно и независимо от девиаций, возникающих под действием других маневров. Вследствие этого результирующая девиация представляет собой итог наложения всех составляющих с учетом времени возникновения каждой из них. Суммарная девиация, возникающая при повторном маневрировании, может существенно отличаться как по значению, так и по характеру изменения во времени от той, которая появляется в результате однократного маневра.
от каждого предыдущего маневра практически исчезла до начала следующего, то чувствительный элемент гирокомпаса как бы «запоминает» девиацию от каждого отдельного маневра и полностью ее воспроизводит во времени одновременно и независимо от девиаций, возникающих под действием других маневров. Вследствие этого результирующая девиация представляет собой итог наложения всех составляющих с учетом времени возникновения каждой из них. Суммарная девиация, возникающая при повторном маневрировании, может существенно отличаться как по значению, так и по характеру изменения во времени от той, которая появляется в результате однократного маневра.
Наибольший интерес здесь представляют следующие задачи:
§ При каком характере повторных маневров, и при какой их последовательности во времени результирующая девиация вследствие явления «наследственности» колебаний гирокомпаса, накапливаясь, достигает максимально возможных значений  ?
?
§ Каково максимально возможное значение результирующей девиации , которое может накопиться при повторных маневрах судна?
Анализ показывает, что возможна такая последовательность маневров, при которой в результате «наследственности» колебаний гирокомпаса инерционные девиации накапливаются в такой степени, что могут достичь значения, в 2—2,5 раза большего того, которое может иметь место при однократном маневре.
На основании логических рассуждении можно прийти к мысли, что это произойдет при маневрировании вдоль меридиана и в том случае, если маневры совершаются через промежутки времени, приблизительно равные половине периода затухающих колебаний гирокомпаса в данной широте места. Действительно, при указанных условиях «пиковые» значения девиаций суммируются.

Обратимся к графику зависимости от времени, для V=25 уз, φ=70° и времени полуциркуляции с курса 180° на курс 0° t1 =360 с (рис. 2.17). После первого маневра, отвечающего указанным данным, закон изменения девиации будет определяться кривой 1. Примерно через 70 мин после момента начала первого маневра девиация достигает второго максимального значения.
Если немного раньше этого момента (отмечено стрелкой) сделать повторный маневр, также представляющий собой правую полуциркуляцию, но с курса 0° на курс 180°, то график 2 девиации от этого маневра будет зеркальным отображением графика девиации после первого маневра, только сдвинутым вперед по времени примерно на 58 мин. Взаимное расположение кривых 1 и 2 позволяет сделать вывод, что остаточное значение девиации от первого маневра налагается на девиацию от второго маневра таким образом, что происходит максимально возможное ее накопление. Аналогичные рассуждения можно продолжить применительно к третьему маневру (вновь поворот с курса 180° на курс 0°). Его начало также отмечено стрелкой (график девиации 3).
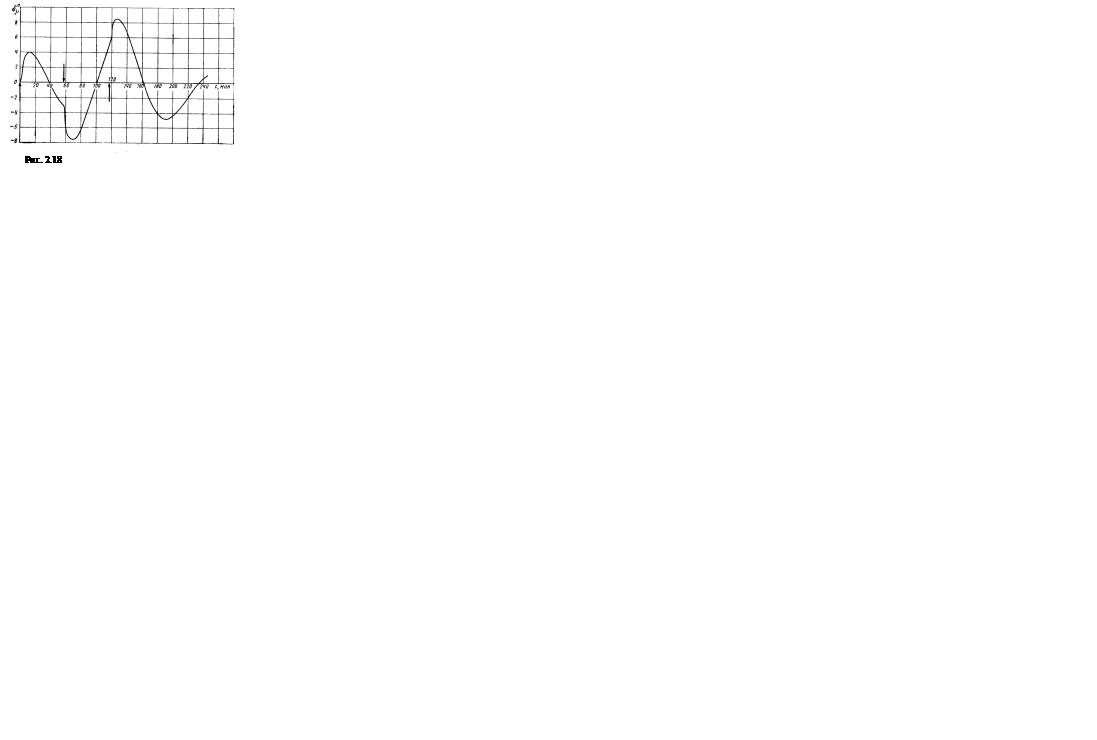 Суммарный график девиации, полученной в результате трех маневров, приведен на рис. 2.18. Поскольку девиация, возникающая после первого маневра, постепенно затухает, после некоторого числа маневров (практически трех-четырех) максимум результирующей девиации
Суммарный график девиации, полученной в результате трех маневров, приведен на рис. 2.18. Поскольку девиация, возникающая после первого маневра, постепенно затухает, после некоторого числа маневров (практически трех-четырех) максимум результирующей девиации
 достигнет наибольшего возможного
достигнет наибольшего возможного
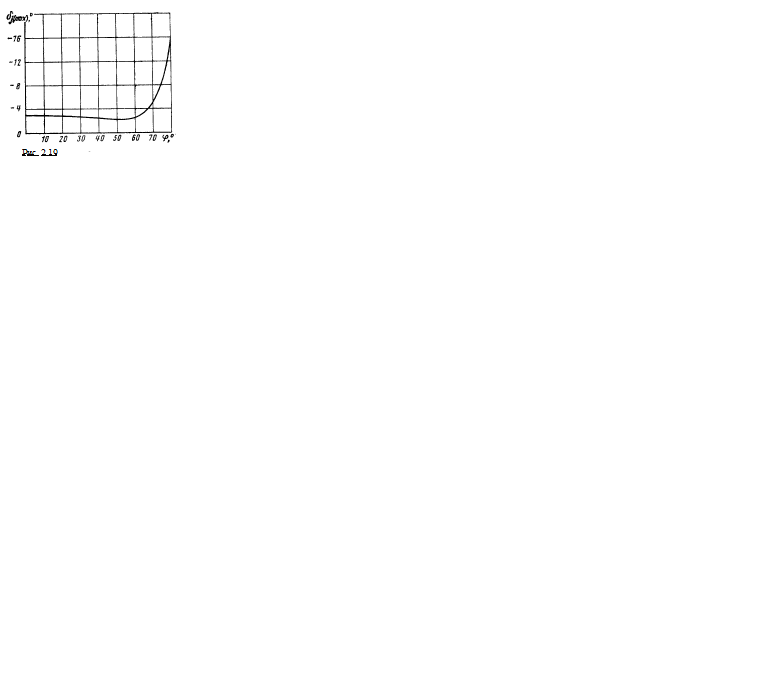
Для количественной оценки максимально возможной девиации, которая может накопиться в результате повторных маневров судна, рассчитан график, приведенный на рис. 2.19. Этот график построен  =25 уз (первый маневр) и дает немного завышенное значение величины . Тем не менее, его можно использовать для пересчета максимального значения девиации для гирокомпасов типа “Курс-4” на любой вариант маневра. Пересчет производится по следующей формуле:
=25 уз (первый маневр) и дает немного завышенное значение величины . Тем не менее, его можно использовать для пересчета максимального значения девиации для гирокомпасов типа “Курс-4” на любой вариант маневра. Пересчет производится по следующей формуле:
 (2.47)
(2.47)
где  - значение девиации, взятое из графика на рис. 2.18, - изменение северной составляющей скорости судна в результате маневра.
- значение девиации, взятое из графика на рис. 2.18, - изменение северной составляющей скорости судна в результате маневра.
В современных гирокомпасах особенно тех, которые работают в составе интегрированных навигационных комплексов, осуществляется компенсация суммарной инерционной девиации, как правило, совместно со скоростной девиацией. Для этого производится их аналитическая оценка на основании информации о параметрах движения судна.
Дата добавления: 2017-02-13; просмотров: 3113;
Поиск по сайту
Узнать еще
- Девиация магнитного компаса
- Девиация магнитного компаса
- Девиация магнитного компаса. Компасные направления.
- Девиация, порождаемая судовыми магнитными силами
- Инерционная девиация первого рода
- Компасы. Компасный меридиан. Девиация
- Креновая девиация магнитного компаса
- Первый закон Ньютона Инерционная система. Третий закон Ньютона.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
