Креновая девиация магнитного компаса
Следует иметь в виду, что креновая девиация появляется как при наличии качки судна, так и при его движении со статическим креном и дифферентом. Количественная оценка девиации в первом случае или при наличии обеих факторов представляет определенную сложность. Это связано с тем, что в результате качки судна возникают силы инерции, которые воздействуют на картушку компаса, вынуждая ее совершать колебания не только в азимуте, но и относительно плоскости горизонта. В этих условиях на нее будет действовать вертикальная составляющая напряженности магнитного поля Земли, что приведет к появлению дополнительных отклонений картушки от направления меридиана. В результате магнитный компас станет не только показывать курс судна с ошибкой, но и его картушка начнет совершать колебания относительно курсовой черты, затрудняя съем показаний.
 Учитывая сказанное, на практике рассмотривают более простой случай, когда в процессе движения судна картушка компаса не выходит из плоскости горизонта или ее отклонения пренебрежимо малы. Это может иметь место при наличии только статического крена и дифферента или когда ускорения, возникающие в результате качки, несущественны. В этом случае влиянием вертикальной составляющей магнитного поля Земли можно пренебречь и девиацию рассматривать лишь как результат изменения параметров намагниченности судна.
Учитывая сказанное, на практике рассмотривают более простой случай, когда в процессе движения судна картушка компаса не выходит из плоскости горизонта или ее отклонения пренебрежимо малы. Это может иметь место при наличии только статического крена и дифферента или когда ускорения, возникающие в результате качки, несущественны. В этом случае влиянием вертикальной составляющей магнитного поля Земли можно пренебречь и девиацию рассматривать лишь как результат изменения параметров намагниченности судна.
В описанных условиях становится очевидным допущение о малости углов крена и дифферента, что позволяет, в свою очередь, рассматривать их влияние независимо друг от друга.
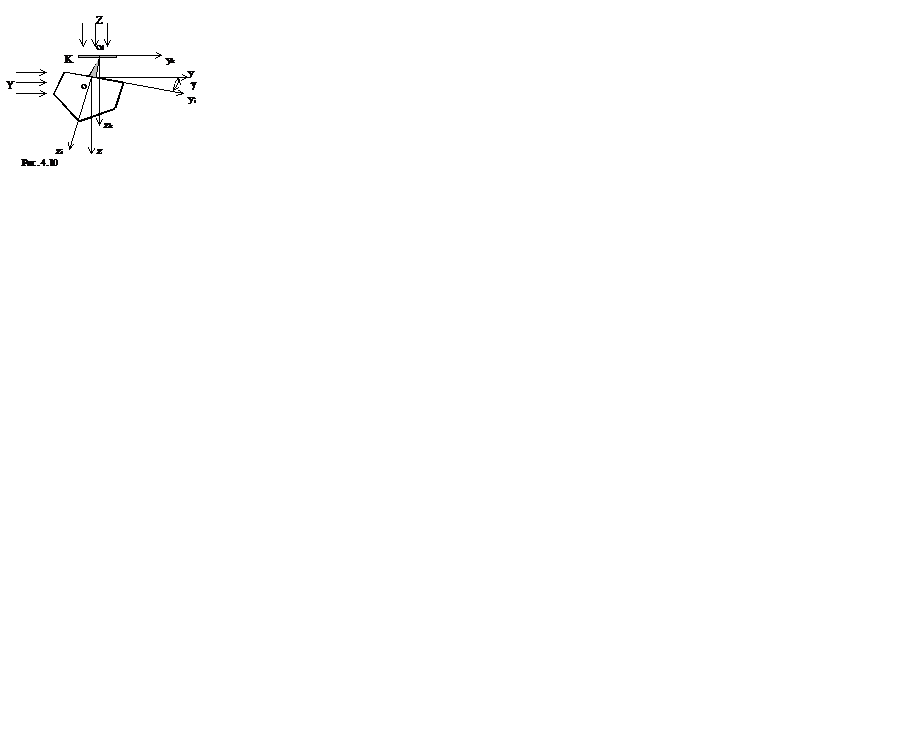
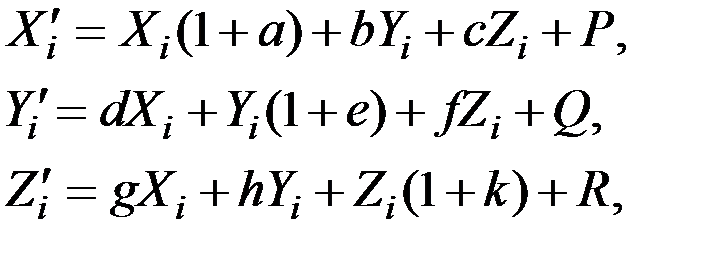
Будем считать, что судно идет произвольным курсом и имеет некоторый установившийся крен g (рис. 4.10). Составляющие Хi¢, Yi¢ и Zi¢ судового магнитного поля при наличии указанного крена будут определяться уравнениями Пуассона следующего вида:
 (4.25)
(4.25)
где Xi, Yi, Zi - составляющие земного магнитного поля вдоль осей оxi yi zi, a…k – коэффициенты Пуассона, Р, Q, R – cоставляющие судового магнитного поля, порождаемые магнитотвердыми материалами. Для компаса, установленного в диаметральной плоскости судна, коэффициенты b, d, f, и h пренебрежимо малы, и их можно опустить из рассмотрения. Не будем также учитывать коэффициенты си g, как не оказывающие существенного влияния на полученные результаты. В этих условиях равенства (4.25) примут вид:
 (4.26)
(4.26)
Выразим составляющие Хi, Yi и Zi через соответствующие компоненты X, Y и Z поля, намагничивающего судно:
 (4.27)
(4.27)
Подставляя равенства (4.27) в (4.26) найдем параметры судового поля при наличии крена судна:
 (4.28)
(4.28)
Для оценки влияния полученных составляющих судового магнитного поля на картушку магнитного компаса спроектируем их на оси охк и оук, связанные с ней. Проекция на ось оzк, очевидно, не будет представлять интереса, так как эта составляющая не может отклонять картушку в силу того, что ось оzк перпендикулярна ее плоскости.

(4.29)
Раскрывая скобки и группируя члены по гармоникам, найдем:

(4.30)
Из полученных выражений следует, что крен судна вызывает изменение только поперечной составляющей напряженности судового магнитного поля, которая, в свою очередь, порождает дополнительную девиацию магнитного компаса. Очевидно, что при наличии угла q дифферента судна дополнительную погрешность магнитного компаса будет вызывать ее продольная составляющая. По аналогии с равенствами (4.30) эта составляющая будет определяться следующим соотношением:
 (4.31)
(4.31)
Если имеет место и крен и дифферент судна, обе составляющие будут порождать девиацию компаса, которая является достаточно сложной функцией данных углов и зависит от курса судна.
Дата добавления: 2017-02-13; просмотров: 3196;
Поиск по сайту
Узнать еще
- II. Получение вращающегося магнитного поля и принцип действия АД.
- Анализ уравнений двухгироскопного компаса
- Биологические эффекты электромагнитного излучения миллиметрового диапазона
- Векторный потенциал магнитного поля
- Векторный потенциал магнитного поля.
- Виды электромагнитного излучения
- Вихревой характер магнитного поля.
- Влияние магнитного поля на свойства воды и ее примесей

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
