Принцип действия авторулевого
Авторулевой не является самостоятельным прибором: его обязательно подключают к гирокомпасу или дистанционному магнитному компасу. На рис.2 показана блок-схема авторулевого, поясняющая принцип его действия.
В ПУ имеется переключатель S1, с помощью которого можно установить один из трех видов управления: автоматический, следящий или простой.
При автоматическом виде управления (контакты переключателя S1 находятся в положении 1) в схеме (рис.2) вырабатываются пять сигналов:U1, U2, U3, U4, U5.
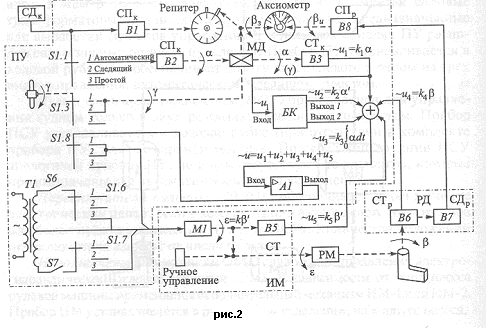
Сигнал U1= k1αформируется сельсином-трансформатором В3,который механически связан с сельсином приемником курса В2.Связь с гирокомпасом
Выполнена через контакты переключателя S1. В следящем и простом режимах сельсин приемник В2 от гирокомпаса отключается. Значение сигнала в следящем режиме определяется выражением U1= k1γ,где γ-угол поворота штурвала. Вращение штурвала передается ротору сельсина В3через механический дифференциал МД. В автоматическом режиме поворотом штурвала устанавливают новое значение заданного курса, которое отмечается подвижным индексом репитера.
Сигнал U2= k2 α’создается в блоке коррекции БК путем дифференцирования сигнала U1, который подается на вход блока БК. Сигнал U2улучшает условия стабилизации судна на заданном курсе, обеспечивая погашение колебаний судна относительно линии заданного курса. Введение дифференцированного сигнала по угловой скорости повышает устойчивость судна на курсе и улучшает качество управления. Чтобы убедиться в этом, рассмотрим рис.2.1 где показано изменение курса и угловой скорости судна во времени. 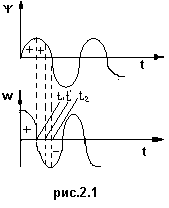 В промежутке 0- t 1 отклонение от курса ψ и угловая скорость ωимеют одинаковые знаки. Это значит, что управляющий сигнал δ3в данном промежутке вследствие введения угловой скорости будет увеличен. Следовательно, руль будет заложен на большую величину, чем при пропорциональном управлении. Благодаря форсированному действию руля судно уйдет с заданного курса на меньший угол. В момент t 1 , когда судно начнет возвращаться на заданный курс, знак угловой скорости меняется на противоположный, в то время как знак ψостается прежним. Следовательно, в интервале t 1- t 2руль будет быстрее возвращаться в исходное положение, что затормозит возвращение судна на заданный курс. Именно это необходимо для погашения инерционности («одерживания») судна.
В промежутке 0- t 1 отклонение от курса ψ и угловая скорость ωимеют одинаковые знаки. Это значит, что управляющий сигнал δ3в данном промежутке вследствие введения угловой скорости будет увеличен. Следовательно, руль будет заложен на большую величину, чем при пропорциональном управлении. Благодаря форсированному действию руля судно уйдет с заданного курса на меньший угол. В момент t 1 , когда судно начнет возвращаться на заданный курс, знак угловой скорости меняется на противоположный, в то время как знак ψостается прежним. Следовательно, в интервале t 1- t 2руль будет быстрее возвращаться в исходное положение, что затормозит возвращение судна на заданный курс. Именно это необходимо для погашения инерционности («одерживания») судна.
В некоторый момент времени t’ отрицательный сигнал по угловой скорости превысит положительный сигнал по курсу. Руль при этом перейдет нейтральное положение и отклонится в сторону противоположного борта, хотя судно еще не вернулось на заданный курс. Это приведет к уменьшению «выброса» судна за линию заданного курса при возвращении на него. В момент t 2судно перейдет линию курса, но это произойдет с уже переложенным в противоположную сторону рулем. В дальнейшем весь процесс повториться.
Сигнал U3= k3  вырабатывается в блоке коррекции БК путем интегрирования сигнала U1 т.е. U3пропорционален интегралу от значения курса по времени. Наличие сигнала U3позволяет исключить несимметричное рыскание судна, обусловленное различными внешними воздействиями. Этот сигнал обеспечивает дополнительную перекладку руля на постоянный угол, чем компенсируется влияние внешнего несимметричного возмущения.
вырабатывается в блоке коррекции БК путем интегрирования сигнала U1 т.е. U3пропорционален интегралу от значения курса по времени. Наличие сигнала U3позволяет исключить несимметричное рыскание судна, обусловленное различными внешними воздействиями. Этот сигнал обеспечивает дополнительную перекладку руля на постоянный угол, чем компенсируется влияние внешнего несимметричного возмущения.
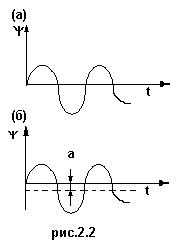
Смысл введения интеграла в закон управления легко пояснить следующим образом. На рис.2.2 (а) показан случай симметричного, а на рис.2.3 (б) несимметрич- ного рыскания судна на курсе. Введем в закон управления в качестве дополнительного сигнала постоянную составляющую α.При этом появляется некоторое, постоянное для данных условий, смещение положения руля относительно диаметральной плоскости судна. Значение и знак его таковы, что возникающие от него гидродинамические воздействия полностью компенсируют несимметричные воздействия на судно.
 Сигнал U4 = k4βформируется сельсином-трансформатором В6,находящемся в рулевом датчике (прибор РД). Ротор сельсина-трансформатора В6механически связан с рулем . Сигнал U4всегда в противофазе с сигналом U1.Он создает отрицательную обратную связь. От значения напряжения U4зависит угол β
Сигнал U4 = k4βформируется сельсином-трансформатором В6,находящемся в рулевом датчике (прибор РД). Ротор сельсина-трансформатора В6механически связан с рулем . Сигнал U4всегда в противофазе с сигналом U1.Он создает отрицательную обратную связь. От значения напряжения U4зависит угол β
перекладки руля (при заданных значениях угла αрыскания судна). Для регулировки сигнала U4и, следовательно, для установления определенного
угла β(в зависимости от условий погоды) имеется регулятор Ко.с. Значение коэффициента Ко.с. регулируют, изменяя посредством устройства БК. Сигнал U3
становится равным нулю. Это необходимо для того, чтобы не увеличивалось время выхода судна на заданный курс.
Сигнал U5= k5β вырабатывается сельсином-трансформатором В5
исполнительного механизма. Ротор В5 механически связан с исполнительным двигателем Ml, который устанавливает величину перемещения выходного валика и положение золотника гидравлической рулевой машины. Угол поворота ε двигателя Ml, таким образом, определяет скорость перекладки руля β', а сигналU5, вырабатываемый сельсином-трансформатором В5, зависит от углаε, т.е. пропорционален величинеβ'. Сигнал U5является сигналом отрицательной обратной связи, обеспечивающим погашение автоколебаний в системе "исполнительный механизм—руль".
Все пять напряжений (U1- U5) суммируются путем последовательного соединения сигнальных элементов: сельсина ВЗ, трансформаторов ТЗ и Т5 блока коррекции, сельсинов В6 и В5. Суммарный сигнал Uс= U1+ U2+ U3+ U4+ U5подается на вход усилителя А1. Величину суммарного сигнала, в зависимости от состояния моря, можно установить переключателем S3 ("Грубо"—"Точно"). В положении "Точно" (при тихой погоде) на вход усилителя поступает все напряжение Uс
При переводе переключателя S3 в положение "Грубо" часть сигнала шунтируется резистором R2. Начальная регулировка потенциометра R2 производится при установке авторулевого на судне. С выхода А1 усиленное напряжение Uс через переключатель S1.8 поступает на управляющую обмотку исполнительного двигателя Ml, который управляет золотником гидравлической рулевой машины.
В следящем режиме (положение 2 контактов переключателя S1) гирокомпас от схемы авторулевого отключается. Основной сигнал u1 вырабатывается сельсином-трансформатором ВЗ за счет поворота штурвала вручную на угол γ (u1 = k1γ). Сигналы u2 и u3 блоком коррекции не вырабатываются, так как в следящем режиме питание этого блока отключено. Сигналы u4 и u5 формируются так же, как в автоматическом режиме.
В простом режимесигналы u1— u5 не вырабатываются. Питание
на двигатель Ml подается от трансформатора Т1 через кнопки S1.6, S7 и контакты переключателя S1.6, S1.7.
В качестве запасного (аварийного) предусмотрено ручное управлениезолотниками рулевой машины (при обесточенном двигателе Ml).
Сельсин-приемник В1 обеспечивает работу репитера курса, а сельсины В7 и В8 — работу аксиометра.
Дата добавления: 2017-02-13; просмотров: 3564;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II группа действий. ВЗАИМОДЕЙСТВИЯ
- II. ОБУЧЕНИЕ ПРОСТЫМ БОЕВЫМ ДЕЙСТВИЯМ
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины
- II. Электрическая схема и принцип действия.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
