Особенности работы гирокомпаса при стационарном движении судна
В рассматриваемом случае ускорения относительного движения судна и порождаемые его качкой, равны нулю. Кроме этого, будем учитывать то обстоятельство, что период прецессионных колебаний чувствительного элемента гирокомпаса, составляющий десятки минут, значительно больше постоянной времени акселерометра, которая, например, в гирокомпасе “Вега” не превышает одной минуты. Указанное обстоятельство позволяет опустить из рассмотрения первое слагаемое третьего уравнения исходной системы (3.9), определяющее динамические параметры акселерометра. В результате эта система уравнений примет следующий вид:
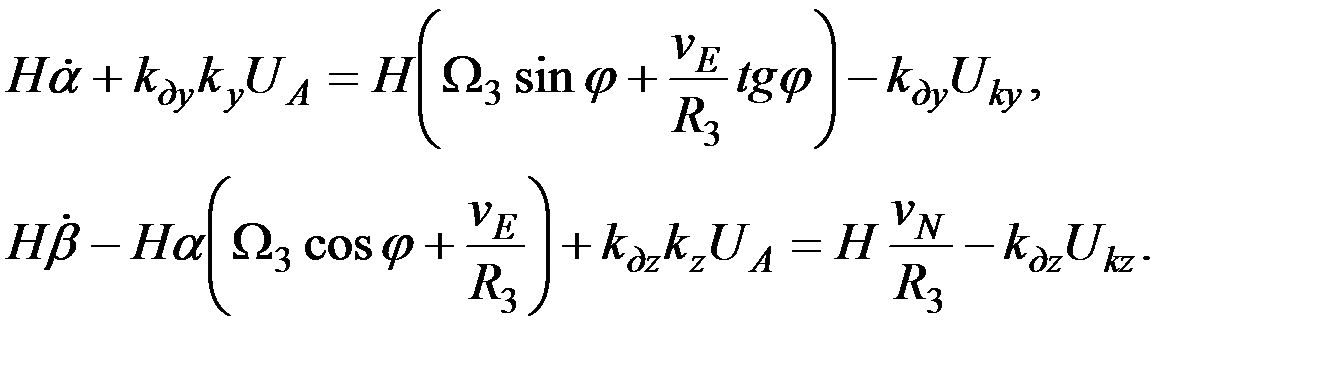
 . (3.10)
. (3.10)
Полученная система уравнений является неоднородной с постоянными коэффициентами. Решение этой системы складывается из общего решения  и
и  однородной системы
однородной системы
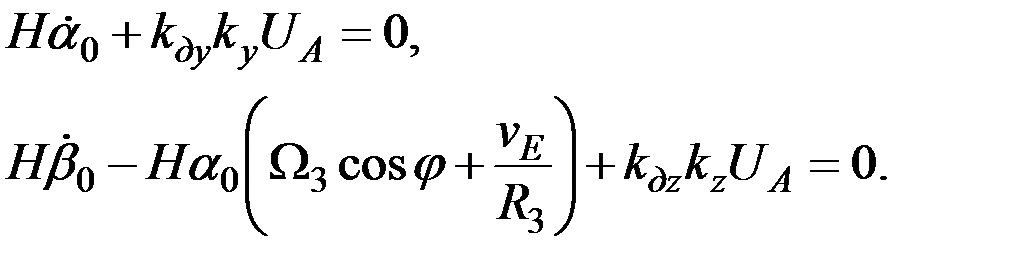
 (3.11)
(3.11)
и частного  и
и  решения неоднородной системы, в которой, учитывая практическую неизменность во времени значений правых частей исходного уравнения, можно опустить члены, содержащие
решения неоднородной системы, в которой, учитывая практическую неизменность во времени значений правых частей исходного уравнения, можно опустить члены, содержащие  и
и 
 . (3.12)
. (3.12)
Определим вначале частное решение системы, характеризующее положение главной оси гироскопа после того, когда прекратятся все переходные процессы.
Для этого подставим третье уравнение системы (3.12) в первые два уравнения. В результате получим:
 (3.13)
(3.13)
где  ,
,  .
.
Равенства (3.13) свидетельствуют о том, что при отсутствии сигналов Uky и Ukz, вырабатываемых внешними системами коррекции,
 (3.14)
(3.14)
 Сравнивая полученные выражения с аналогичными выражениями (2.23) для двухгироскопного компаса, замечаем, что установившееся отклонение αч главной оси гирокомпаса от направления меридиана содержит кроме скоростной девиации составляющую
Сравнивая полученные выражения с аналогичными выражениями (2.23) для двухгироскопного компаса, замечаем, что установившееся отклонение αч главной оси гирокомпаса от направления меридиана содержит кроме скоростной девиации составляющую
. (3.15)
Приближенное равенство в (3.15) возможно ввиду малости vE по сравнению с R3Ω3. Эта составляющая, называемая широтной девиацией, обусловлена выбранным способом гашения прецессионных колебаний гироскопа и становится равной нулю, если разорвать контур демпфирования, т.е. сделать  .
.
Что касается угла βч отклонения главной оси гироскопа от плоскости горизонта, то он в точности соответствует аналогичной координате двухгироскопного компаса с учетом того, что роль модуля  играет
играет  .
.
Как нетрудно заметить из уравнений (3.13), можно сформировать сигналы Uky и Ukz коррекции гироскопа таким образом, чтобы углы αч и βч стали равными нулю при любых стационарных параметрах движения судна. Для этого необходимо выполнить следующие условия:
(3.16)
Последние равенства будут иметь место, если
 (3.17)
(3.17)
Для формирования указанных напряжений необходима внешняя информация о скорости движения судна и широте его места. Информацию о курсе судна, требуемую для определения vN и vЕ, снимают с датчика курса гирокомпаса.
Перейдем к анализу собственного движения главной оси гироскопа. Для этого обратимся к уравнениям (3.11). Если подставить третье уравнение названной системы в первые два уравнения, то они примут следующий вид:
 (3.18)
(3.18)
Запишем характеристический определитель этих уравнений, составленный из коэффициентов левой их части: 
(3.19)
В силу того, что определители для переменных α и β равны нулю, уравнения для этих переменных будут идентичны. Так, уравнение для α примет вид:
 (3.20)
(3.20)
Если поделить все его слагаемые на коэффициент при первом члене, то оно приобретет стандартную форму:
 (3.21)
(3.21)
где
 (3.22)
(3.22)
 (3.23)
(3.23)
Используя последнее выражение найдем период Т0 незатухающих колебаний оси гироскопа:
 (3.24)
(3.24)
Полученное выражение аналогично выражению для периода незатухающих колебаний гирокомпаса с непосредственной коррекцией. Как и ранее, этот период зависит от широты места судна и скорости его движения.
Общее решение уравнения (3.21), как известно, имеет вид
 (3.25)
(3.25)
где q – частота затухающих колебаний гироскопа, определяемая выражением
 , (3.26)
, (3.26)
С1 и С2 – произвольные постоянные интегрирования, зависящие от начальных условий. Если сигналы коррекции Uky и Ukz подобраны таким образом, что выполняются условия (3.16), закон изменения угла α примет вид:
 (3.27)
(3.27)
где α0 – начальное отклонение главной оси гироскопа относительно направления меридиана. Как следует из последнего равенства, в процессе установления в меридиан чувствительный элемент гирокомпаса совершает чисто гармонические колебания. Отсутствие экспоненциальной составляющей решения, имевшей место в двухгироскопных компасах, обусловлено тем, что постоянная времени акселерометра значительно меньше постоянной времени, определяющей скорость перетекания жидкости из сосуда в сосуд в гидравлическом успокоителе колебаний, и практически не влияет на характер переходного процесса.
Подводя итог сказанному отметим, что:
§ 
| Важно! |
§ период затухающих колебаний чувствительного элемента зависит как от параметров прибора, так и от широты места судна и скорости его движения;
§ при отсутствии сигналов коррекции, сформированных внешними устройствами, после завершения переходного процесса гирокомпас будет иметь широтную и скоростную девиации;
введением сигналов внешней коррекции можно скомпенсировать систематические ошибки гирокомпаса.
Дата добавления: 2017-02-13; просмотров: 2313;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- C учетом изменения статической работы балки
- Cила резания при точении
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.
- F50 Расстройства приема пищи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
