Принцип действия гиротахометра
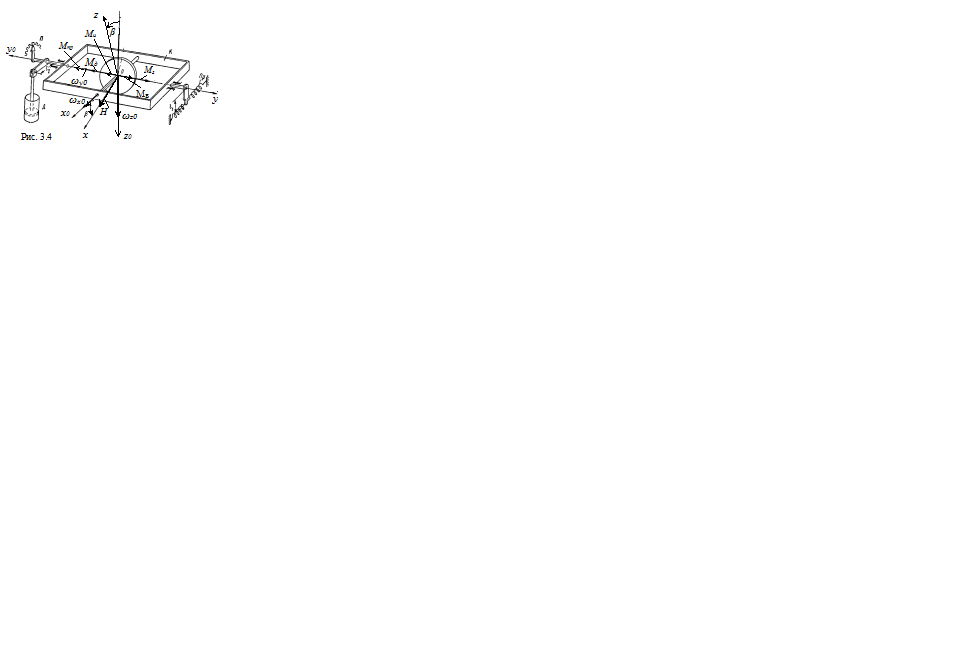 Принципиальная схема простейшего гиротахометра (ГТ), построенного на гироскопе с двумя степенями свободы, представлена на рис. 3.4. Ротор гироскопа установлен в кольце К карданового подвеса. Поворот кольца вокруг оси оу0 ограничивается пружиной Пр, необходимой для создания восстанавливающего момента. Погашение собственных колебаний гироскопа осуществляется демпфером Д. Показания прибора, пропорциональные углу поворота кольца вокруг своей оси подвеса, снимаются в виде напряжения с потенциометра П. Оси ох0у0z0 связаны с судном, а оси охуz, совмещенные в начальном положении (при β=0) с осями ох0у0z0, - с рамкой прибора и в данном случае являются осями Резаля. Ось оz0 является осью чувствительности или входной осью, так как гиротахометр реагирует, в основном, на поворот судна вокруг этой оси; ось оу называется выходной, ввиду того, что снимаемый с потенциометра П сигнал пропорционален углу поворота (прецессии) кольца К вокруг этой оси. Эту ось также называют осью прецессии.
Принципиальная схема простейшего гиротахометра (ГТ), построенного на гироскопе с двумя степенями свободы, представлена на рис. 3.4. Ротор гироскопа установлен в кольце К карданового подвеса. Поворот кольца вокруг оси оу0 ограничивается пружиной Пр, необходимой для создания восстанавливающего момента. Погашение собственных колебаний гироскопа осуществляется демпфером Д. Показания прибора, пропорциональные углу поворота кольца вокруг своей оси подвеса, снимаются в виде напряжения с потенциометра П. Оси ох0у0z0 связаны с судном, а оси охуz, совмещенные в начальном положении (при β=0) с осями ох0у0z0, - с рамкой прибора и в данном случае являются осями Резаля. Ось оz0 является осью чувствительности или входной осью, так как гиротахометр реагирует, в основном, на поворот судна вокруг этой оси; ось оу называется выходной, ввиду того, что снимаемый с потенциометра П сигнал пропорционален углу поворота (прецессии) кольца К вокруг этой оси. Эту ось также называют осью прецессии.
Составим уравнения, описывающие работу гиротахометра. Результирующую угловую скорость вращения основания прибора будем представлять ее составляющими ωх0, ωу0 и ωz0 по осям, связанным с судном. В общем случае к ротору гироскопа будут приложены следующие моменты (рис. 3.4):
§ момент Мг гироскопической реакции на внешние воздействия;
§ момент Ми сил инерции рамки и связанных с ней элементов, в частности ротора гироскопа;
§ момент Мд демпфирующих сил, порождаемых, в основном, демпфером Д;
§ момент Мпр упругих сил, порождаемый пружиной:
§ возмущающий момент (момент внешних сил) Мв.
В соответствие с принципом Даламбера сумма указанных моментов относительно оси оу должна быть равна нулю. Найдем выражения для указанных моментов.
Как известно, момент гироскопической реакции равен по модулю произведению кинетического момента гироскопа на составляющую абсолютной угловой скорости вращения его ротора вокруг оси oz:
 (3.1)
(3.1)
Приближение, принятое в полученном выражении, допустимо вследствие малости значений угла β.
Момент сил инерции ротора и рамки подвеса будет определяться угловыми ускорениями  вращения основания прибора и
вращения основания прибора и  прецессии гироскопа:
прецессии гироскопа:
 (3.2)
(3.2)
Момент демпфирующих сил можно представить в следующем виде:
 (3.3)
(3.3)
где kд – коэффициент демпфирования. Аналогично выглядит и выражение для момента упругих сил:
 (3.4)
(3.4)
где с – коэффициент упругости, равный моменту, прикладываемому пружиной к рамке гироскопа, при единичном значении угла β.
Момент внешних сил определяется трением Мт в опорах подвеса рамки гироскопа, а также воздействиями f(t), возникающими из-за конструктивного и технологического несовершенства прибора:
 (3.5)
(3.5)
Используя полученные выражения, уравнения, описывающие закон изменения угла поворота рамки подвеса, можно записать в виде:
 (3.6)
(3.6)
Если основание прибора вращается в пространстве только с угловой скоростью ωzo, а моменты сил трения в опорах подвеса и другие возмущающие моменты отсутствуют, то установившийся угол βу отклонения главной оси от положения равновесия будет определяться следующим выражением:
 . (3.7)
. (3.7)
Полученное выражение показывает, что угол β, а, следовательно, и сигнал, снимаемый с потенциометра П (рис. 3.4), будут пропорциональны измеряемой угловой скорости ωzo.
Однако факторы, опущенные в данном случае из рассмотрения, могут оказывать заметное влияние на точность показаний прибора. Так, влияние перекрестной составляющей ωх0 угловой скорости вращения основания прибора увеличивается с увеличением угла β прецессии гироскопа. Поэтому на практике стремятся этот угол сделать по возможности минимальным или свести его вообще к нулю. Стремятся снизить также величину момента сил сухого трения или исключить его полностью. Для этого используют различного рода подвесы ротора гироскопа. В частности, широ
| У |
| ДУ |
| Р |
| ДМ |
| Рис. 3.5 |
Уравнения (3.6) можно представить и в ином виде [36]:
 (3.8)
(3.8)
где
 ,
,  ,
,  ,
,  . (3.9)
. (3.9)
Достоинством последней формы записи уравнений является то, что на их базе легко получить передаточные функции гиротахометра по отношению к рассматриваемым внешним воздействиям. Так, представляя уравнения в преобразованиях по Лапласу-Карсону [16], передаточную функцию по отношению к полезному воздействию можно записать в виде:
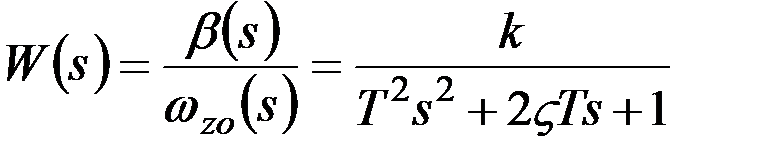 . (3.10)
. (3.10)
Как известно, выражение (3.10) позволяет не только оценить динамические характеристики исследуемого прибора, но широко используется при анализе работы различных систем автоматического управления, в которых применяются ГТ.
Дата добавления: 2017-02-13; просмотров: 4267;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II группа действий. ВЗАИМОДЕЙСТВИЯ
- II. ОБУЧЕНИЕ ПРОСТЫМ БОЕВЫМ ДЕЙСТВИЯМ
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины
- II. Электрическая схема и принцип действия.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
