Виды регулирующих воздействий (законы регулирования)
Релейное регулирование. Особенностью работы регуляторов является создание прерывистости потока вещества (энергии) на входе в объект регулирования. Соответственно колеблется значение выходной координаты. Релейные регуляторы просты, надежны и имеют низкую стоимость.
На рис.5.35, а приведена широко применяемая функциональная схема релейного регулирования давления пара во вспомогательном паровом котле 2, осуществляемая включением и выключением электроприводного топочного устройства 1 с помощью регулятора давления пара сильфонного типа 3. Управление топочным устройством осуществляется с помощью электромагнитного пускателя 4.
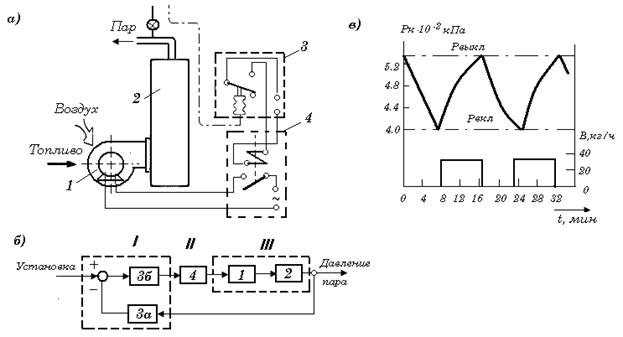
Рисунок 5.35. Релейное регулирование
На рис.5.35, б представлена структурная схема САРд пара, где I – реле давления (регулятор), II – пускатель, III – объект регулирования. Временная диаграмма изменения регулируемой величины иллюстрируется на рис.5.35, в. Моменты включения топочного устройства отмечены величиной расхода топлива g с 8-й минуты по 18-ю и с 23-й минуты по 32-ю. Соответственно на оси давления котла  отмечены штрих-пунктирные линии включения – выключения топочного устройства. Давление удерживается в диапазоне
отмечены штрих-пунктирные линии включения – выключения топочного устройства. Давление удерживается в диапазоне  . Таким образом, статизм системы автоматического регулирования давления определится величиной
. Таким образом, статизм системы автоматического регулирования давления определится величиной 
 .
.
Частота включений зависит от величины потребления пара (внешнее возмущение, нагрузка). Неравномерность регулирования можно уменьшить за счет сужения установки реле давления, однако, при этом возрастает частота включений в работу топочного устройства. Это скажется на надежности работы САРд. Релейные САР применяются для регулирования процессов, в которых допускаются существенные колебания регулируемого параметра (регулирование давления сжатого воздуха в компрессорах при набивке баллонов, уровня воды в утилизационных котлах, регулирование температуры в морозильных камерах и т.п.).
Пропорциональные регуляторы. Если управляющий сигнал регулятора пропорционален отклонению регулируемой величины, то такие регуляторы называются пропорциональными (обозначаются русской буквой «П» или латинской «P»). Примером простейшего П-регулятора является регулятор уровня воды в баке, предложенный и реализованный в паровой машине И.И. Ползуновым, или регуляторы уровня, представленные на рис. 5.27. Наглядное представление о работе этого П-регулятора дает его временная характеристика (рис.5.36).
Так как данный регулятор представляет собой типовое идеальное звено нулевого порядка, то в любой момент времени  выходной сигнал равен
выходной сигнал равен  , где коэффициент статического усиления
, где коэффициент статического усиления  .
.
П-регулятором, например, также является пневматический регулятор непрямого действия (рис. 5.37). Этот регулятор описывается уравнением типового апериодического звена первого порядка  .
.
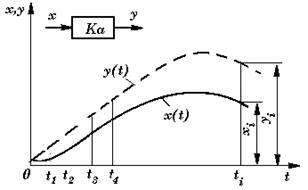
Рисунок 5.36. Временная характеристика П-регулятора
На рис. 5.37 обозначены: 1 – измеритель входного сигнала  ; 2 – измеритель сигнала задания
; 2 – измеритель сигнала задания  ; 3 – питание; 4 – усилитель мощности; 5 – жиклер; 6 – устройство для измерения коэффициента усиления; 7 – заслонка; 8 – сильфон отрицательной обратной связи (вместе с пружиной сильфон образует ГОС)
; 3 – питание; 4 – усилитель мощности; 5 – жиклер; 6 – устройство для измерения коэффициента усиления; 7 – заслонка; 8 – сильфон отрицательной обратной связи (вместе с пружиной сильфон образует ГОС)
Как правило, устройство для изменения координаты задания выполняется в виде конструкции, позволяющей изменять предварительную затяжку пружины (показано на рисунке справа).
Заслонка 7 закреплена на горизонтальном рычаге, перемещение правого конца рычага определяется сигналом рассогласования  между входной величиной и заданием , а левого – сигналом отрицательной обратной связи.
между входной величиной и заданием , а левого – сигналом отрицательной обратной связи.
В потоке воздуха между постоянным сопротивлением 5 и сопротивлением пневмопреобразователя формируется управляющий сигнал, пропорциональный зазору между соплом и заслонкой. Так как сопротивление 5 дросселирует поток до ламинарного режима движения, то мощность управляющего сигнала незначительна, поэтому предусмотрен усилитель мощности 4.
Угловой груз 6 обеспечивает горизонтальное положение заслонки независимо от значения входной координаты х.
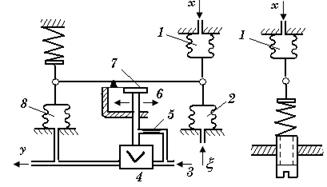
Рисунок 5.37. Функциональная схема пропорционального
пневматического регулятора непрямого действия
Питание пневматического безрасходного усилителя мощности обеспечивается так называемым сервисным воздухом при определенном давлении.
Интегральные регуляторы. При предъявлении высоких требований в части обеспечения точности поддержания регулируемого параметра в судовой энергетике часто применяют и н т е г р а л ь н ы е р е г у л я т о р ы (обозначение русским символом И или латинским I).
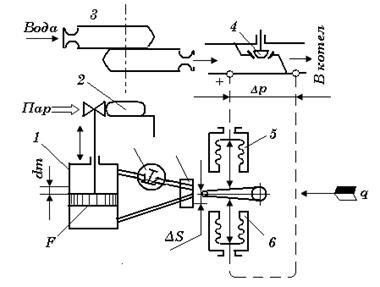
Рисунок 5.38. Функциональная схема САР давления
на питательном клапане парового котла
На рис.5.38 приведена схема интегрального регулятора, установленного в системе автоматического регулирования давления на питательном клапане парового котла.
Регулирующее воздействие пропорционально не отклонению регулируемого параметра, а интегралу от этого отклонения. Разность давлений  измеряется сильфонами 5, управляющими положением струйной трубки 6 гидравлического усилителя.
измеряется сильфонами 5, управляющими положением струйной трубки 6 гидравлического усилителя.
К трубке подводится под давлением конденсат. При нейтральном (среднем) положении трубки давление в полостях сервомотора 1 одинаково, но по мере ее отклонения от среднего положения через плату 7 поступает в рабочую полость сервомотора конденсат с интенсивностью  . Сервомотор 1 управляет парорегулирующим клапаном турбопривода 2 к насосу 3, который подает питательную воду в котел через регулирующий клапан 4. Дроссель 8 служит для изменения скорости перемещения поршня сервомотора (времени сервомотора) при регулировках и настройке.
. Сервомотор 1 управляет парорегулирующим клапаном турбопривода 2 к насосу 3, который подает питательную воду в котел через регулирующий клапан 4. Дроссель 8 служит для изменения скорости перемещения поршня сервомотора (времени сервомотора) при регулировках и настройке.
Уравнение движения имеет вид
 ,
,
где  - соответственно относительные изменения регулирующего воздействия и регулируемой величины,
- соответственно относительные изменения регулирующего воздействия и регулируемой величины,
 и
и  ;
;
 - время интегрирования, с,
- время интегрирования, с,
 .
.
Величина  - настроечный параметр И-регулятора, устанавливается дросселем 8. На рис. 5.39,а представлена астатическая характеристика регулирования, на рис. 5.39,б – графическая интерпретация уравнения И-регулятора. Управляющий сигнал
- настроечный параметр И-регулятора, устанавливается дросселем 8. На рис. 5.39,а представлена астатическая характеристика регулирования, на рис. 5.39,б – графическая интерпретация уравнения И-регулятора. Управляющий сигнал  в любой момент времени пропорционален площади под кривой
в любой момент времени пропорционален площади под кривой  . Равновесие может быть достигнуто лишь при условии
. Равновесие может быть достигнуто лишь при условии  .
.
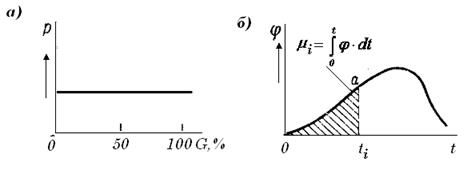
Рисунок 5.39. Характеристики И-регулятора
К недостаткам интегрального закона регулирования следует отнести затягивание процесса и ухудшение качества регулирования в динамике.
Автоматическое регулирование с улучшенными характеристиками можно получить путем комбинирования пропорционального и интегрального воздействий. Для обозначения пропорционально-интегрального регулятора введены символы ПИ или PI.
Пропорционально-интегральный регулятор.На рис. 5.40 представлена функциональная схема такого регулятора.
Пропорциональная составляющая формируется за счет сигнала, поступающего в полость сильфона отрицательной обратной связи 8.
Изменение выходного сигнала  по этой составляющей пропорционально изменению входного сигнала X: Δy1 = kR ∙ X. Интегральная составляющая ПИ-регулятора формируется за счет сигнала, поступающего в полость сильфона 11 через дроссель 9 (положительная обратная связь). Объем 10 играет роль аккумулятора сжатого воздуха и облегчает установку времени интегрирования регулятора дросселем 9. Изменение интегральной составляющей
по этой составляющей пропорционально изменению входного сигнала X: Δy1 = kR ∙ X. Интегральная составляющая ПИ-регулятора формируется за счет сигнала, поступающего в полость сильфона 11 через дроссель 9 (положительная обратная связь). Объем 10 играет роль аккумулятора сжатого воздуха и облегчает установку времени интегрирования регулятора дросселем 9. Изменение интегральной составляющей  выходного сигнала
выходного сигнала  .
.
Эффект интегрального воздействия аналогичен эффекту ручной подстройки координаты задания после каждого изменения нагрузки. Полное изменение выходного сигнала определится согласно принципу суперпозиции как сумма составляющих процесса
 .
.
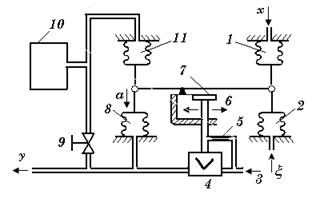
Рисунок 5.40. Функциональная схема ПИ-регулятора
Переходной процесс идеального ПИ-регулятора при скачкообразном изменении входной координаты представлен на рис.5.41 (в идеальном регуляторе не учитывается инерционность).
Интегральная составляющая ухудшает устойчивость системы и затягивает переходные процессы. Тем не менее, ПИ-регуляторы получили широкое применение в первую очередь для объектов, требующих большой перестановочной силы регулирующего органа.
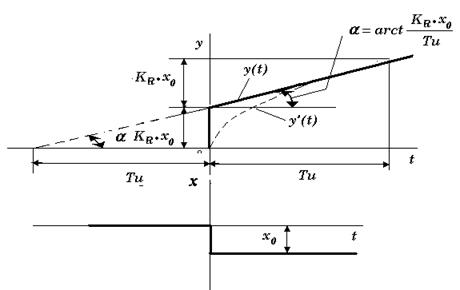
Рисунок 5.41. Переходной процесс ПИ-регулятора:
 - идеальный регулятор;
- идеальный регулятор;  - реальный регулятор
- реальный регулятор
Пропорционально-дифференциальное регуляторы.Воздействие по производной часто совмещают с пропорциональным регулирующим воздействием в так называемых пропорционально-дифференциальных (ПД) регуляторах. Это позволяет улучшить качество переходных режимов САР.
На рис.5.42 приведена функциональная схема ПД-регулятора. От схемы П-регулятора (см. рис. 5.37) она отличается наличием дросселя 12, расположенного перед сильфоном 8 обратной связи. С помощью дросселя устанавливается постоянная времени дифференцирования  регулятора. Такой регулятор называют регулятором с упреждением.
регулятора. Такой регулятор называют регулятором с упреждением.
Перемещение правого конца рычага, несущего заслонку 7 пневмо-усилителя, определяется сигналом рассогласования на входе регулятора, а левого – изменением давления сжатого воздуха в полости сильфона 8. В статике, когда давление по обе стороны дросселя 12 выравнивается, регулятор работает как пропорциональный с коэффициентом усиления  . В начальный момент переходного процесса, когда действие обратной связи блокировано дросселем 12, регулятор ведет себя как регулятор с коэффициентом усиления
. В начальный момент переходного процесса, когда действие обратной связи блокировано дросселем 12, регулятор ведет себя как регулятор с коэффициентом усиления  . По мере уменьшения разности давлений на дросселе 12 коэффициент усиления возвращается к значению
. По мере уменьшения разности давлений на дросселе 12 коэффициент усиления возвращается к значению  .
.
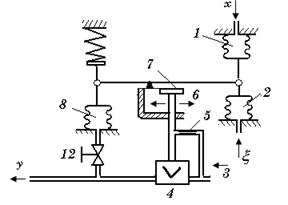
Рисунок 5.42. Функциональная схема ПД-регулятора (регулятор с упреждением)
Уравнение движения идеального ПД-регулятора (безынерционного)  с ненулевыми начальными условиями (при
с ненулевыми начальными условиями (при  ). При ступенчатом входном воздействии
). При ступенчатом входном воздействии  решение вышеприведенного уравнения с учетом ненулевых начальных условий имеет вид
решение вышеприведенного уравнения с учетом ненулевых начальных условий имеет вид
 .
.
Решение данного уравнения представлено на рис. 5.43. Как видно из данного рисунка в начальный момент переходного процесса следует мгновенная реакция регулятора на изменение входной координаты (линия 0-1 при включенной обратной связи,  ). Участок 1-2 характеризует участок введения обратной связи со скоростью, пропорциональной времени дифференцирования Тд.
). Участок 1-2 характеризует участок введения обратной связи со скоростью, пропорциональной времени дифференцирования Тд.
Реальный ПД-регулятор имеет инерционность, в результате чего переходный процесс максимально вписывается в кривую 0-1-2 (пунктирная линия). Выходной сигнал ПД-регулятора
 .
.
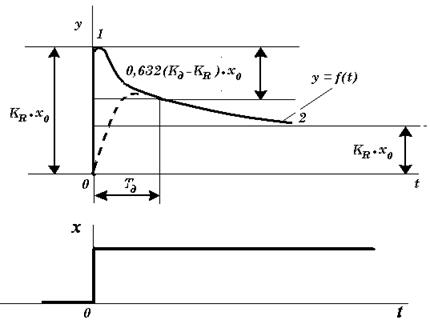
Рисунок 5.43. Переходной процесс ПД-регулятора.
ПД-регуляторы с производной в цепи обратной связи (их иногда называют регуляторами с упреждением) получили наибольшее применение в СЭУ. Значительно реже используются регуляторы с производной в прямой цепи. Редко используются в практике ИД-регуляторы (интегрально-дифференциальные).
Пропорционально-интегрально-дифференциальный (ПИД) регулятор.
Выходной сигнал ПИД-регулятора представляет собой сумму сигналов трех воздействий: пропорционального, интегрального и дифференциального
 .
.
Добавление к пропорциональному воздействию интегральной составляющей обеспечивает астатическую характеристику регулирования. Дифференциальная составляющая компенсирует ухудшение динамических свойств, вносимых интегральной составляющей и повышает быстродействие системы.
На рис. 5.44,а показано изменение выходного сигнала идеального ПИД-регулятора  , вызванное скачкообразным возмущением на входе. Начальный период переходного процесса определяется действием дифференциальной составляющей 1, выключающей, а затем постепенно вводящей отрицательную обратную связь. Далее начинает действовать интегральная составляющая 2, изменяющая выходной сигнал до тех пор, пока не исчезнет рассогласование между текущим и заданным значениями регулируемой величины.
, вызванное скачкообразным возмущением на входе. Начальный период переходного процесса определяется действием дифференциальной составляющей 1, выключающей, а затем постепенно вводящей отрицательную обратную связь. Далее начинает действовать интегральная составляющая 2, изменяющая выходной сигнал до тех пор, пока не исчезнет рассогласование между текущим и заданным значениями регулируемой величины.
На рис. 5.44,б представлен переходный процесс реального, обладающего инерционностью, регулятора.
Взаимодействие элементов ПИД-регулятора представлено на рис. 5.45.
Рассогласование x - ξ на входе регулятора приводит к перемещению правого конца рычага, несущего заслонку 7 пневмоусилителя 4, и соответственному отклонению выходного сигнала y. При этом изменяется давление сжатого воздуха, поступающего через дроссели 12 и 9 в полости сильфонов 8 и 11 (соответственно дифференциальной и интегральной составляющих).
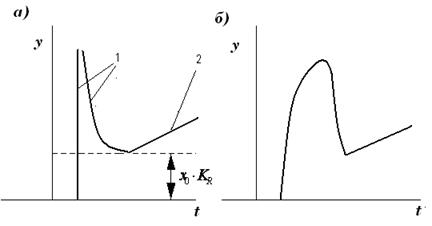
Рисунок 5.44. Переходные процессы ПИД-регулятора при скачкообразном возмущении:
а) – идеальный ПИД-регулятор; б) – реальный
Выходной сигнал начинает изменяться во времени (см. рис. 5.45). Знаки действия составляющих показаны на рис. 5.45 (величины их характеризуются значениями  (минус) и
(минус) и  (плюс) по отношению к изменению входной величины (плюс)).
(плюс) по отношению к изменению входной величины (плюс)).
При  регулятор теряет устойчивость, так как давление в сильфоне интегральной составляющей 11 изменяется быстрее, чем в сильфоне дифференциальной составляющей 8.
регулятор теряет устойчивость, так как давление в сильфоне интегральной составляющей 11 изменяется быстрее, чем в сильфоне дифференциальной составляющей 8.
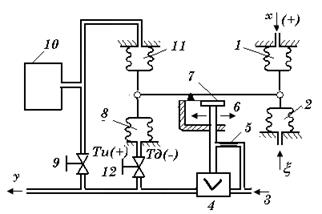
Рисунок 5.45. Функциональная схема пневматического
ПИД-регулятора
Действительно, пусть  вызывает изменение выходного сигнала
вызывает изменение выходного сигнала  . Так как
. Так как  , то давление в сильфоне 11 будет расти быстрее, чем в сильфоне 8. Это вызовет дальнейшее увеличение сигнала
, то давление в сильфоне 11 будет расти быстрее, чем в сильфоне 8. Это вызовет дальнейшее увеличение сигнала  вместо его ограничения.
вместо его ограничения.
Такая схема будет устойчива только тогда, когда отрицательная связь будет преобладающей, т.е.  .
.
Рекомендуется принимать  .
.
Наилучшее соотношение (по экспериментальным данным)
 .
.
Передаточная функция ПИД-регулятора в соответствии с уравнением имеет вид
 .
.
ПИД - регуляторы получили достаточно широкое применение в судовой автоматике. Они реализуют полный закон регулирования.
При надлежащей настройке ПИД-регуляторы позволяют получать высокие показатели переходных процессов.
В качестве примера применения ПИД-регулятора можно привести систему автоматического управления курсом судна. Автоматическое управление движением судна по заданному курсу осуществляется автоматическим управляющим устройством, называемым авторулевым.
Анализ опыта эксплуатации систем автоматического управления курсом судна позволяет сформулировать основные задачи, решаемые современными авторулевыми:
автоматическая стабилизация курса — поддержание заданного курса с минимальным рысканием судна в условиях дестабилизирующего влияния возмущающих воздействий: волнения моря, ветра, течений;
автоматическое маневрирование по курсу — автоматическое изменение курса судна и приведение его в соответствие с заданным курсом без вмешательства оператора-рулевого;
автоматическое устранение дрейфа судна с заданной траектории при работе в режиме стабилизации курса, возникающего в результате действия лаговой постоянной составляющей внешних возмущений.
Все современные авторулевые реализуют принцип управления по отклонению, поскольку датчики внешних возмущений отсутствуют. В автоматическом режиме в авторулевом реализуется ПИД-закон управления курсом.
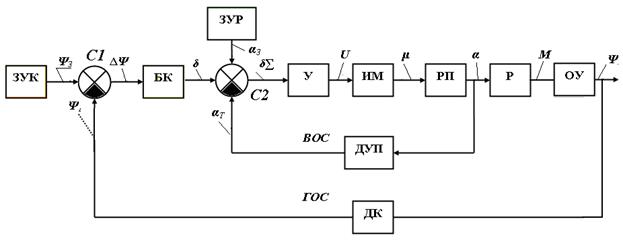
Рисунок 5.46. Обобщенная функциональная схема управления курсом судна.
ЗУК – задающее устройство курса; С1- С2 – сумматоры; БК – блок коррекции; У – усилитель; ИМ – исполнительный механизм; РП – рулевой привод; Р – руль; ОУ – орган управления (судно); ДУП – датчик угла перекладки; ДК – датчик курса; ВОС – вспомогательная обратная связь; ГОС – главная обратная связь.
Рассмотрим обобщенную функциональную схему автоматической системы управления курсом судна (рис. 5.46), которая представляет собой совокупность объекта управления ОУ (судно), регулирующего органа – руль Р и управляющего устройства – авторулевого. Все авторулевые осуществляют управление по отклонению регулируемой величины – курса судна Ψ. Сигнал рассогласования курса (∆Ψ = Ψ3 – Ψт) формируется элементом сравнения (сумматором С1) на основе сигнала заданного курса Ψз, вырабатываемого электромеханическим задающим устройством курса ЗУК и сигнала текущего значения Ψт, который с помощью датчика курса ДК образует главную обратную связь ГОС системы управления. Сигнал рассогласования курса поступает на вход регулятора, состоящего из блока коррекции БК и усилителя У. С выхода усилителя сигнал управления U поступает на исполнительный механизм, который воздействует на рулевой привод Р, осуществляющий перекладку руля. При перекладке руля на угол α создается вращающий момент М, вызывающий поворот судна относительно мидель - шпангоута и изменение его курса. Система управления наряду с ГОС содержит вспомогательную обратную связь ВОС, которая реализована с помощью датчика угла перекладки ДУП и элемента сравнения (сумматора С2). На выходе сумматора С2 получается сигнал рассогласования угла перекладки (δ∑ = αз - αт). С помощью задающего устройства руля ЗУР формируется значение заданного угла перекладки αз. Вспомогательная обратная связь образует внутренний замкнутый контур, который называется следящей системой управления рулем.
Известно, что при основных эксплуатационных скоростях для большинства судов, оборудованных рулевым устройством, углы дрейфа не превышают 10-15°, а угловые скорости 2-3°/с, что позволяет значительно упростить систему дифференциальных уравнений движения судна.
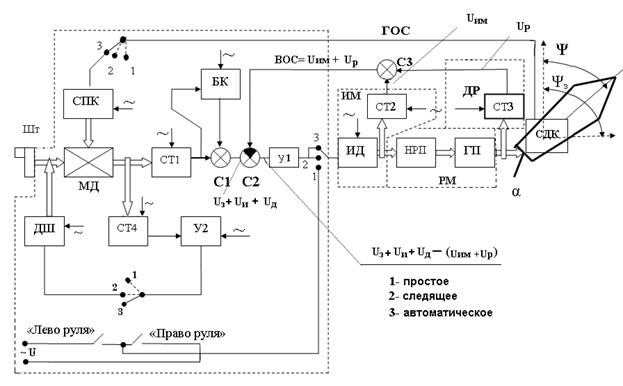
Рисунок 5.47. Структурная схема авторулевого.
СПК – сельсин-приемник курса; Шт – штурвал; ДШ – двигатель штурвала; СТ1-СТ4 – сельсины-трансформаторы; БК-блок коррекции; У1-У2 усилители; ИМ -исполнительный механизм; МД – механизм дифференциальный; НРП – насос регулируемой производительности; ГП – гидропривод; СДК – сельсин-датчик гирокомпаса; ДР – датчик руля; РМ – рулевая машина.
Структурную схему (см. рис.5.47) имеют большинство современных АР, различающихся элементной базой, схемно-конструктивным использованием ПИД-регулятора, выходного усилителя, схемой и принципом управления рулевым приводом (непрерывным или позиционным), а также типом рулевого привода. В данной схеме основными управляющими элементами являются сельсины СТ1-СТ4, работающие в трансформаторном режиме, и сельсин-приемник курса (СПК), работающий в индикаторном режиме от сельсина-датчика курса гирокомпаса (СДК).
Автоматический режим управления курсом (см. рис.5.47) осуществляется в положении 3 переключателя П при включенной ГОС. В этом режиме ротор сельсина-задатчика СТ1 выходным валом механического дифференциала МД разворачивается на угол рассогласования курса Ψ=Ψз - Ψ, при этом выходное напряжение сельсина Uз пропорционально рассогласованию курса. Сигнал Uз дополняется в БК составляющими по производной Uд и интегралу Uи . Работой рулевого привода управляет результирующее напряжение Uз + Uд + Uи – Uн – Uр на входе У1. В результате отработки приводом выходного сигнала дифференцирующего устройства Uд обеспечивается достаточно быстрая перекладка руля, создающая тормозящий момент при уходе судна с заданного курса.
При возвращении судна на заданный курс сигнал Uд меняет знак и руль перекладывается на угол сдерживания, обеспечивая плавный подход судна к траектории. На выходе интегрирующего устройства БК вырабатывается напряжение Uп , пропорциональное разности амплитуд рыскания судна на левый и правый борт, появляющееся в результате действия лаговой постоянной составляющей возмущающих воздействий. Вследствие отработки приводом сигнала Uн создается нулевое нейтральное положение руля, в котором Uн = Uр , что обеспечивает компенсацию постоянной составляющей возмущений и устранение лагового дрейфа судна с траектории. От того, насколько точно настроен ПИД-регулятор авторулевого, зависят точность поддержания курса, амплитуда и частота перекладок руля в режиме стабилизации, а также плавности переходного процесса автоматической отработки задаваемых изменений курса.
Дата добавления: 2019-09-30; просмотров: 1425;
Поиск по сайту
Узнать еще
- I. Определение, виды радиоактивности, радиоактивные семейства
- II. Виды ионизирующих излучений и единицы измерения ИИ
- II. ЭКОНОМИЧЕСКАЯ ПОЛИТИКА, ее цели и виды. ФИАСКО ГОСУДАРСТВА
- А.2 Виды адсорбентов и их характеристики
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения
- Автономия в зарубежных странах: понятие и виды
- Авторитарный политический режим: понятие, признаки, виды

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
