Пример САУ, действующей по принципу управления по отклонению
Принципиальная схема системы автоматической стабилизации угловой скорости двигателя постоянного тока с независимым возбуждением, действующей по принципу управления по отклонению, представлена на рисунке 20.
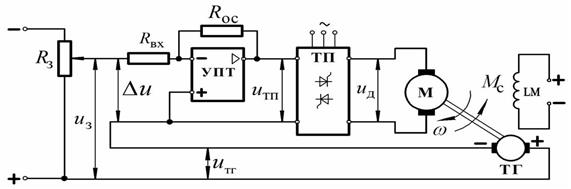
Рис.20. Принципиальная схема системы автоматической стабилизации угловой
скорости двигателя постоянного тока (принцип управления по отклонению)
В данной схеме вместо моментной муфты ММ (схема разомкнутого управления, рисунок 17) находится тахогенератор ТГ. С помощью тахогенератора и потенциометра Rз, включенных таким образом, что их выходные напряжения uтг и uз направлены противоположно, так что
Δu = uз − uтг (1.8.)
формируется сигнал рассогласования Δu(t), пропорциональный ошибке
Δ(t) = ωз – ωд (t) (1.9.)
Напряжение uтг усиливается по мощности и величине в тиристорном преобразователе ТП и усилителе УПТ, и преобразованное в напряжение uд, изменяет скорость вращения двигателя, тем самым уменьшая величину ошибки Δ(t).
Представив
uз = kз ωз, uтг = kтг ωд(t), uтп = kупт (uз - uтг ) (1.10.)
и принимая kз = kтг = k, получим выражение для входного сигнала ТП:
uтп(t) = k kупт [ωз −ωд (t)] = k kупт Δ(t) (1.11.)
Структурная схема системы изображена на рисунке 21.
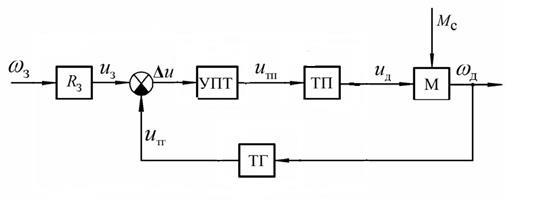
Рис.21. Структурная схема системы автоматической стабилизации угловой
скорости двигателя постоянного тока (принцип управления по отклонению)
Предположим, что заданное напряжение uз – const, моменты сопротивления
Mc,0 = Mc(t) = const. Тогда получаем следующие равенства:
ωд(t ) = ω0; uд(t) = uд,0; uтг(t ) = uтг,0; Δu = uз − uтг,0 = Δu0 (1.12.)
Увеличивая момент сопротивления до некоторого значения Mc,1 > Mc,0 , угловая скорость будет уменьшаться на величину Δω1 и станет равной ω1 = ω0 - Δω1, что изображено на рисунке 22 (кривая 1).
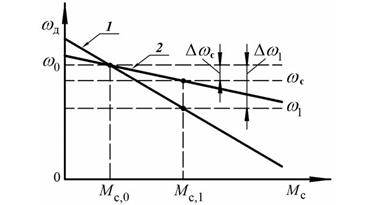
Рис.22. Графики зависимости угловой скорости двигателя от нагрузки на вал
Величина Δω1 характеризует падение угловой скорости при отсутствии управления.
При увеличении нагрузки на вал двигателя снижается его угловая скорость, соответственно, через обратную связь уменьшается напряжение на выходе тахогенератораuтг = uтг,0 − Δ uтг,1. Сигнал рассогласования увеличивается и принимает значение:
Δu = uз − uтг = uз − (uтг,0 − Δuтг,1) = Δu0 + Δuтг,1 (1.13.)
Поэтому автоматически увеличивается напряжение на входе двигателя uд,1 , и, соответственно, угловая скорость двигателя.ωд,1.
Режим, установившийся после окончания переходного процесса, характеризуется
напряжением uд,1 > uд,0 и соответствующей угловой скоростью ωс, однако новое значение скорости меньше первоначального значения, бывшего до начала управления
ω0 > ωс (рисунок 22, кривая 2). Из этого следует, что при возрастании момента сопротивления снижается угловая скорость, и чтобы угловая скорость увеличилась нужно увеличить напряжение на входе двигателя uд, что осуществляется только при уменьшении напряжения тахогенератора uтг, которое уменьшается при снижении угловой скорости.
В рассмотренной системе с обратной связью, реализующей принцип управления по отклонению, мы обнаружили наличие ошибки в установившемся режиме, которую можно представить, как Δ ωс = ω0 − ωс. Величина данной ошибки зависит от коэффициента усиления тахогенератора и на практике может быть намного меньше ошибки системы, реализующей принцип разомкнутого управления.
Дата добавления: 2017-01-26; просмотров: 2412;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II.1.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.2.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.3.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.4.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.5.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.6.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
