Анализ релейных систем автоматического управления
Рассмотрим релейные системы, которые относятся к наиболее исследованным нелинейным системам. В данных системах единственным нелинейным звеном является реле-регулятор, которое делает нелинейной всю систему. Обозначим F (х)— нелинейную функцию х, и представим дифференциальное уравнение САУ с реле-регулятором, имеющее следующий вид:
 (3.10.)
(3.10.)
Различают следующие типы реле-регуляторов:
- позиционные,
- регуляторы с постоянной скоростью исполнительного механизма.
На рисунке 98 приведены основные виды статических характеристик реле-регуляторов.
Статические характеристики подразделяются по:
- количеству значений, принимаемых выходной величиной на двухпозиционные (рис.98,а-г) и трехпозиционные (рис.98,д,е),
- знаку выходной величины – на нереверсивные (рис.98,а-в) и реверсивные (рис.98,г-е),
- по наличию зоны возврата (зоны неоднозначности) – с наличием зоны возврата (рис.98,а-д) и без зоны возврата (рис.98,е).
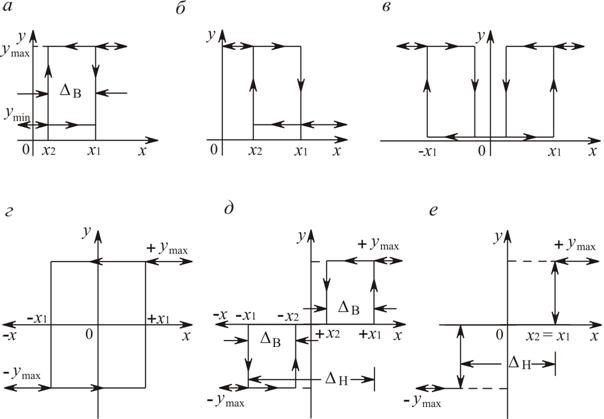
Рис.98. Статические характеристики нереверсивных двухпозиционных (а-в) и
реверсивных (г-е) реле-регуляторов:
а) прямая, б) обратная, в) нейтрального электромагнитного реле,
г) реверсивная двухпозиционная, д) трехпозиционная с зоной возврата,
е) трехпозиционная без зоны возврата
Двухпозиционный регулятор имеет два устойчивых состояния, трехпозиционный – три. Зона возврата в большинстве случаев характеризует неоднозначность величины выходного параметра при увеличении и уменьшении величины входного параметра.
В общем случае, согласно рисунку 98, релейные элементы характеризуются:
– порогами переключения (параметры срабатывания и отпускания) х1 и х2;
– выходными сигналами у - максимальным и - у - минимальным значениями выходного параметра;
– зоной возврата ∆ В (шириной зоны неоднозначности), здесь ∆ В = х1 - х2;
– зоной нечувствительности ∆ Н;
– коэффициентом возврата Кв, характеризующим относительную ширину зоны возврата:
 (3.11.)
(3.11.)
– мощностью срабатывания Рср (минимальной мощностью входного сигнала, приводящего к срабатыванию реле);
– выходной мощностью Рвых = Imax Uпит, где Imax - максимальный отключаемый ток, Uпит – напряжение источника питания;
– коэффициентом усиления сигнала по уровню:
 (3.12.)
(3.12.)
– динамическими параметрами релейного элемента: tср - временем срабатывания и tотп - временем отпускания.
Реле-регуляторы также подразделяются по различным признакам:
а) по назначению – реле управления, защиты, сигнализации, времени;
б) по способу воздействия на выходную цепь – контактные и бесконтактные реле;
в) по виду входного сигнала – реле тока, скорости, уровня и т.д.;
г) по роду энергии источника питания – электрические, пневматические, гидравлические и т.д.
Дата добавления: 2017-01-26; просмотров: 2814;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Case-study (анализ конкретных ситуаций, ситуационный анализ)
- CRM - стратегия управления взаимоотношениями с клиентом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
