Аппроксимация модели объекта в виде n последовательных звеньев
Полученная в результате процедуры идентификации в пакете MatLab передаточная функция статической непрерывной модели исследуемого ТОУ представляет собой неоднородное линейное дифференциальное уравнение четвертого порядка:
 ,
,
которое не соответствует ни одному из существующих типовых динамических звеньев и не позволяет выполнить синтез регулятора или корректирующего звена для обеспечения заданных значений параметров качества регулирования. Таким образом, необходимо выполнить аппроксимацию модели объекта, представив ее в виде соединения типовых динамических звеньев.
Экспериментальные переходные характеристики (кривые разгона) устойчивых объектов второго и более высоких порядков с запаздываем (или без) имеют характерный S-образный вид (рис. 23).
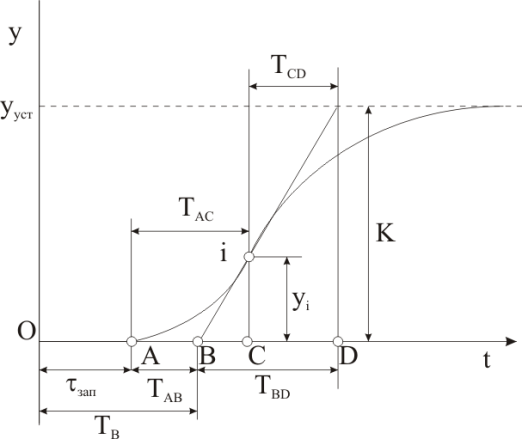
Рисунок 23 – Определение параметров модели объекта по экспериментальной характеристике
По графику экспериментальной характеристики переходного процесса (кривой разгона) определяем установившиеся значение выходной величины и коэффициент усиления соответственно:
 , (11)
, (11)
Характерной точкой на кривой разгона динамического звена является точка перегиба i, геометрический смысл которой заключается в том, что график переходной характеристики переходит в ней с одной стороны касательной на другую.
Через точку перегиба i проводим касательную до пересечения с осью Ot (точка В на рис. 23) и прямой  . Соотношение длин отрезков CD и BD позволит установить порядок исследуемого динамического звена:
. Соотношение длин отрезков CD и BD позволит установить порядок исследуемого динамического звена:
На следующем этапе определяется коэффициент демпфирования  по номограмме, представленной на рис. 24, для рассчитанного на предыдущем шаге соотношения
по номограмме, представленной на рис. 24, для рассчитанного на предыдущем шаге соотношения  и постоянная времени Т типового колебательного звена из соотношения:
и постоянная времени Т типового колебательного звена из соотношения:
 .
.
Принятое значение коэффициента демпфирования позволит уточнить положение точки А на графике переходной характеристики (рис. 22) по соотношению  на номограмме (рис. 24) и вычислить время транспортного запаздывания:
на номограмме (рис. 24) и вычислить время транспортного запаздывания:
 . (12)
. (12)
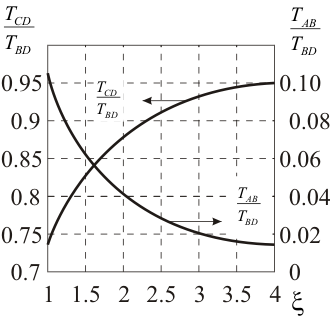
Рисунок 24 – Номограмма для определения параметров модели объекта
В случае, если соотношение  меньше 0,74, то в общем виде передаточную функцию технологического объекта управления запишем следующим образом:
меньше 0,74, то в общем виде передаточную функцию технологического объекта управления запишем следующим образом:
 .
.
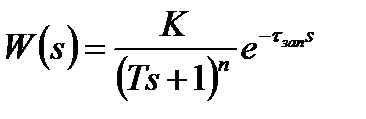
Коэффициент усиления рассчитывается аналогично, как было сделано выше, по формуле (11). Число n статических звеньев первого порядка с одинаковыми значениями постоянных времени определим с помощью номограммы, показанной на рис. 25.
Рисунок 25 – Переходные характеристики устойчивых объектов разного порядка
На графике (рис. 26) проводим касательную через точку перегиба i и определяем отношение  (как это проделано на рис. 23), значение округляем до ближайшего меньшего табличного значения (табл. 3) и принимаем за n.
(как это проделано на рис. 23), значение округляем до ближайшего меньшего табличного значения (табл. 3) и принимаем за n.
Таблица 3 – Данные для определения параметров передаточной функции системы по переходной характеристике
| n | 
| 
| 
| 
| 
|
| 0.264 | 0.104 | 2.718 | 0.282 | ||
| 0.323 | 0.218 | 3.695 | 0.805 | ||
| 0.353 | 0.319 | 4.463 | 1.425 | ||
| 0.371 | 0.410 | 5.119 | 2.100 |
Затем по графику (рис. 26) определяют длину отрезка BD –  и, используя для найденного порядка n табличное значение (табл. 3), рассчитывают постоянную времени Т. Далее из таблицы 3 с учетом вычисленных значений параметров: и n, находим
и, используя для найденного порядка n табличное значение (табл. 3), рассчитывают постоянную времени Т. Далее из таблицы 3 с учетом вычисленных значений параметров: и n, находим  и время транспортного запаздывания по формуле (12).
и время транспортного запаздывания по формуле (12).
Для рассматриваемого технологического объекта управления характерно как транспортное, так и переходное запаздывание. Первое обусловлено транспортировкой вещества (воздуха) через трубопроводы, а второе – высоким порядком исследуемого ТОУ и близкими значениями постоянных времени типовых динамических элементов, из которых он составлен. Наличие запаздывания в САУ осложняет задачу регулирования технологического параметра на объекте, поэтому ее стремятся уменьшить: устанавливают чувствительный элемент первичного измерительного преобразователя и исполнительное устройство как можно ближе к объекту управления.
Выполним идентификацию модели ТОУ по выше описанной методике по переходной характеристике объекта (рис.26). Вычислим значения характерных временных интервалов и выходного сигнала в точке перегиба:

Поскольку соотношение ( ) равно 0,61, порядок исследуемого технологического объекта будет выше второго. Для уточнения значения рассчитаем соотношение ( )= 0,327. Из таблицы 3, округлив до ближайшего меньшего, получим  .
.
Наличие на графике переходного процесса (рис. 26) участка, на котором при изменении входного сигнала выходной остается неизменным, свидетельствует о наличии запаздывания. Таким образом, ТОУ можно представить в виде последовательного соединения трех апериодических звеньев первого порядка и типового звена запаздывания, передаточная функция ресивера в результате опишется выражением вида:
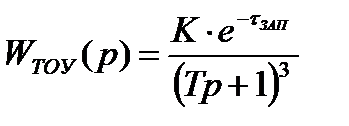 .
.
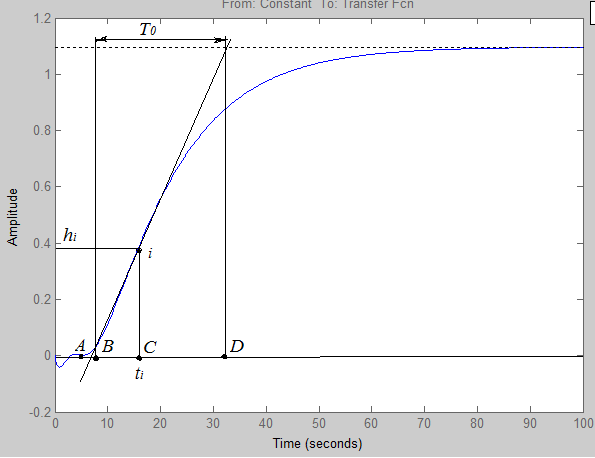
Рисунок 26 – Определение параметров ТОУ по переходной характеристике
Статический коэффициент усиления К модели ТОУ можно вычислить как по формуле (8), так и с помощью встроенной команды MatLab:
>> k=dcgain(Ws)
k = 1.0964
Время запаздывания τ определяем по диаграмме переходной характеристики непрерывной модели (рис.26), полученной в процессе идентификации. На графике находим точку соответствующую максимальной скорости изменения входной величины, т.е. точку перегиба (смена знака кривизны) кривой и проводим касательную к диаграмме. Отрезок времени до от 0 до точки В (рис. 24) является временем запаздывания τ, состоящим из транспортного запаздывания τтр и емкостного запаздывания τе .
 .
.
Для расчета постоянной времени Т объекта управления воспользуемся табличным значением (табл. 3) соотношения =3,695 для системы третьего порядка и измеренной длиной интервала BD:
 .
.
Таким образом, модель исследуемого статического объекта, представленная в виде типовых динамических звеньев, запишется следующим образом:
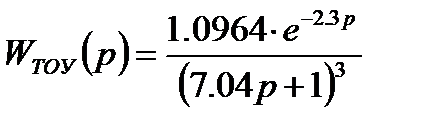 .
.
Для проверки адекватности полученной передаточной функции построим график переходного процесса в приложении Simulink (рис. 27):

Рисунок 27 – Структурно-математическая схема ТОУ в обозначениях Simulink
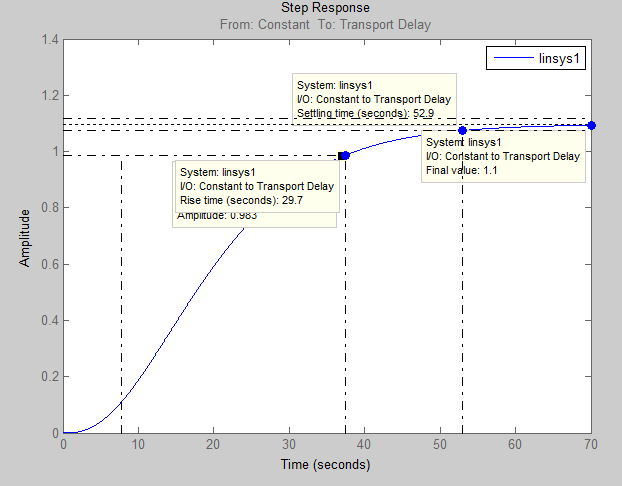
Рисунок 28 – Переходная характеристика модели ТОУ аппроксимированная в виде n последовательных апериодических звеньев
Значения критериев качества в соответствии с полученной кривой разгона (рис.28) для аппроксимированной модели технологического объекта управления в виде n последовательных звеньев составят:
- время нарастания (Rise time) – 29,7 с;
- переходного процесса (Setting time) – 52,9 с;
- установившееся значение выходной величины (Final value) – 1,1 с;
- пиковая амплитуда (Peak amplitude) – 1,1;
- перерегулирование (Overshoot) – 0%;
- статическая ошибка – 10%.
Дата добавления: 2021-05-28; просмотров: 1005;
Поиск по сайту
Узнать еще
- PCI является стандартной шиной для подключения периферийных устройств. Среди них можно отметить сетевые карты, модемы, звуковые карты и платы захвата видео.
- А. Возникновение и эволюция глобального моделирования
- А. Классификация видов моделирования (Л.5)
- Аварии на объектах обустройства
- Аварии на пожаро- и взрывоопасных объектах
- Аварии на химически опасных объектах
- Адаптивное управление по заданной модели
- Актуальность и значимость создания доступного объекта социальной инфраструктуры.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
