Задача синтеза регуляторов
При исследовании системы автоматического управления обычно решают одну из следующих задач: синтеза или анализа. При анализе структура и параметры САУ известны, требуется определить поведение в заданных условиях. Во втором случае, для заданного объекта управления требуется построить управляющее устройство, которое обеспечит требуемые значения показателей качества.
В задачу синтеза входит выбор структуры и параметров управляющего устройства (регулятора), при которых САУ будет устойчива, иметь необходимую точность воспроизведения задающего воздействия и качество переходного процесса.
Основными этапами решения задачи синтеза управляющих устройств являются:
1. формулировка технического задания на проектирование на основе анализа возможных режимов САУ (установившихся и переходных), возмущающихся воздействий, необходимой точности, ограничений на управляющие и регулируемые параметры, времени работы и др. Разрабатывается функциональная схема САУ, выбирается тип исполнительных, усилительных, измерительных устройств, вид используемой энергии и т.д.
2. проектируется структура управляющего устройства на основе следующих требований к качеству:
· статическая ошибка при подаче на вход САУ единичного ступенчатого воздействия не должна превышать допустимого значения или быть равной нулю;
· максимальное перерегулирование  в системе не должно превышать допускаемого перерегулирования
в системе не должно превышать допускаемого перерегулирования  ;
;
· время переходного процесса  не должно превышать допускаемого значения;
не должно превышать допускаемого значения;
· максимальное ускорение выходной переменной при заданных условиях не должно превышать допустимого значения и т.д.
Область допустимых значений прямых показателей качества регулирования для наглядности представляют в виде «коробочки Солодовникова» [14] (рис. 34).
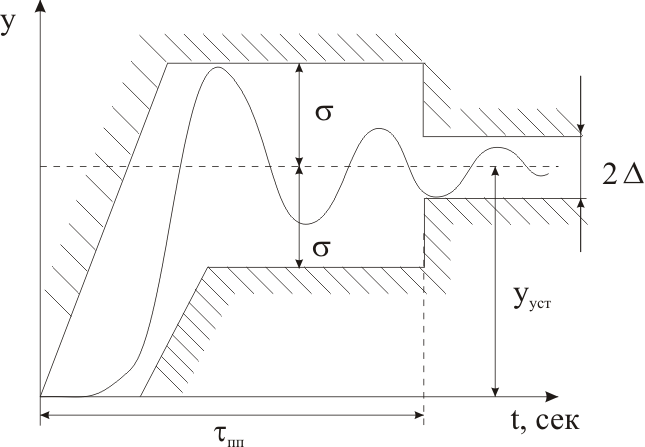
Рисунок 34 – Область допустимых значений показателей переходной характеристики [14]
3. Рассчитываются параметры управляющего устройства, используя либо методы, направленные на обеспечение требований к качеству регулирования, либо метод подбора, при котором оператор системы должен как можно точнее соответствовать желаемому оператору.
4. Анализ устойчивости САУ с учетом вычисленных на шаге 3 значений параметров регулятора и проверка соответствия скорректированной системы требованиям, сформулированным в техническом задании. В случае не удовлетворительного результата, возвращаемся ко второму и третьему шагу.
5. Аппаратная реализация устройства управления, т.е. разработка принципиальной схемы в соответствии с выбранной структурой и рассчитанными параметрами.
6. Испытания синтезированной САУ.
На рисунке 35 показаны переходные характеристики некоторого технологического объекта (О) и систем регулирования, построенных на его основе и реализующих один из типовых алгоритмов регулирования (П, И, ПИ, ПД, ПИД). Диаграммы изменения выходного сигнала получены в ответ на единичное ступенчатое воздействие, настройки каналов регулирования назначались таким образом, чтобы обеспечить одинаковый запас устойчивости.
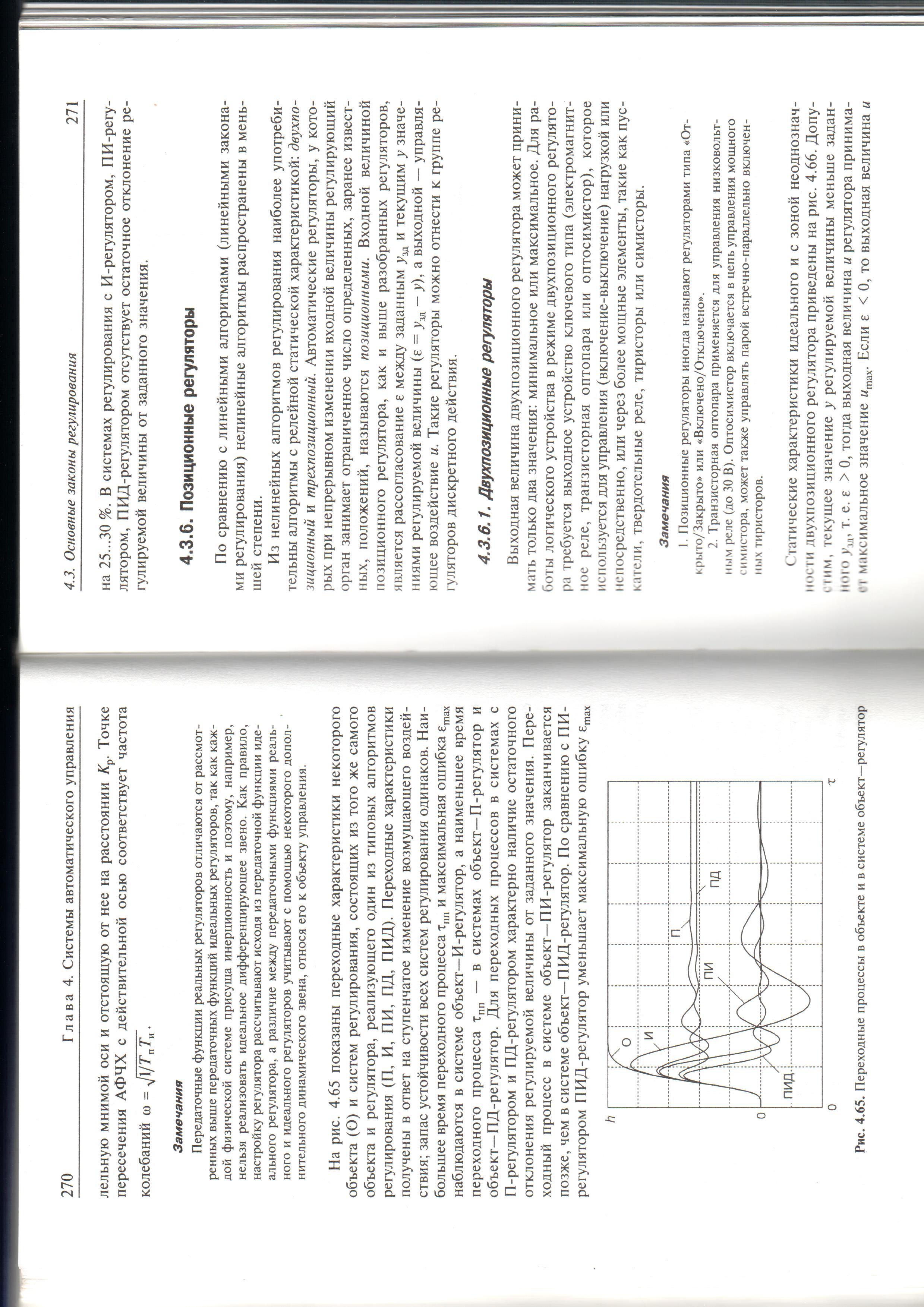
Рисунок 35 – Переходные процессы в объекте и в системе объект - регулятор
По результатам анализа графиков переходных характеристик следует отметить, что:
· наибольшее время переходного процесса и перерегулирование наблюдается в системе с И-регулятором;
· наименьшее время переходного процесса в системах с П- и ПД-регулятором, но в обоих случаях присутствует статическая ошибка;
· время переходного процесса и перерегулирование в системе с ПИ-регулятором оказываются больше, чем с ПИД-регулятором на 25-30%.
Дата добавления: 2021-05-28; просмотров: 982;
Поиск по сайту
Узнать еще
- N-канальная СМО с отказами (задача Эрланга)
- Автоматизация эвристических методов синтеза новых систем
- Анализ результатов функционального синтеза системы электропривода
- Анализ целевых сценариев в организационных задачах судостроения
- Анаэробные пути ресинтеза АТФ.
- Анемии, связанные с нарушением синтеза гемоглобина (железодефицитные анемии). Этиология, патогенез, картина периферической крови и костного мозга.
- Аэробный механизм ресинтеза АТФ.
- Аэробный путь ресинтеза АТФ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
