Дифференцирование векторных величин
Производная вектора. Рассмотрим вектор  , который изменяется по закону:
, который изменяется по закону:  , где t – время, тогда производная вектора по переменной t равна:
, где t – время, тогда производная вектора по переменной t равна:
|
Дифференциалом (приращением) функции  называется выражение
называется выражение  , тогда, используя выражение для производной вектора
, тогда, используя выражение для производной вектора  , получим дифференциал вектора :
, получим дифференциал вектора :
Производная произведения векторов. Производная от скалярного и векторного произведения осуществляется по известным формулам:
(Примечание: некоторые понятия векторного анализа – градиент, циркуляция, ротор, а также элементы теории вероятности – мы рассмотрим в дальнейшем по ходу курса).
2. Кинематика поступательного движения. Любое механическое движение тела можно представить в виде суммы поступательного и вращательного движений.
Поступательным называется такое движение, при котором любая прямая, проведённая в теле, остаётся параллельной самой себе. При этом скорости всех точек тела одинаковы.
Для того чтобы описать движение, нужно задать систему отсчёта – это тело отсчёта, которое условно считается неподвижным, система координат, связанная с телом отсчёта, и прибор для измерения времени («часы»).
Принцип относительности Галилея: механические явления и форма законов, их описывающих, не изменяются при переходе из одной инерциальной системы отсчёта (ИСО) в другую (напомним, что ИСО называется такая система отсчёта, в которой выполняется 1-й закон Ньютона).
Никакими механическими опытами нельзя определить, покоится ли данная СО или движется прямолинейно и равномерно.
Преобразования Галилея. Пусть имеется две ИСО. Система отсчёта К, которую будем считать неподвижной, и система  , которая будет двигаться равномерно и прямолинейно со скоростью V0 (рис. 1.7).
, которая будет двигаться равномерно и прямолинейно со скоростью V0 (рис. 1.7).
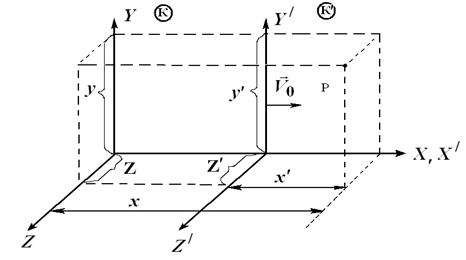
Рис. 1.7
Выберем координатные оси X, Y, Z системы К и оси  ,
,  ,
,  системы , так чтобы оси X и совпадали, а Y и , а также Z и были параллельными друг другу.
системы , так чтобы оси X и совпадали, а Y и , а также Z и были параллельными друг другу.
Найдём связь между координатами x, y, z некоторой точки Р в системе К и координатами  ,
,  ,
,  той же точки в системе .
той же точки в системе .
Если начать отсчёт времени с того момента, когда начала координат обеих систем совпадает, то из рисунка следует:
Продифференцировав эти уравнения по времени, можно получить связь проекций скоростей точки Р в системах К и на оси координат:
Причём время в обеих системах отсчёта согласно классическим представлениям  .
.
Заметим, что при скоростях  , сравнимых со скоростью света, преобразования Галилея должны быть заменены на более общие преобразования Лоренца. При описании движения микрочастиц используются методы квантовой механики.
, сравнимых со скоростью света, преобразования Галилея должны быть заменены на более общие преобразования Лоренца. При описании движения микрочастиц используются методы квантовой механики.
3. Понятие материальной точки. Тело, размерами которого в условиях данной задачи можно пренебречь, называется материальной точкой. Линия, которую описывает материальная точка при своём движении, называется траекторией. В зависимости от формы траектории различают прямолинейное, криволинейное, движение по окружности и т.п.
Пусть материальная точка (частица) переместилась по некоторой траектории из точки 1 в точку 2. Расстояние между точками 1 и 2, отсчитываемое вдоль траектории, называется путём (обозначен  ). Прямолинейный отрезок, проведённый из точки 1 в точку 2, называется перемещением, или вектором перемещения (обозначен
). Прямолинейный отрезок, проведённый из точки 1 в точку 2, называется перемещением, или вектором перемещения (обозначен  ) (рис. 1.8).
) (рис. 1.8).
 Скорость – векторная величина, характеризующая быстроту перемещения и направление движения частицы. Разобьём траекторию на участки
Скорость – векторная величина, характеризующая быстроту перемещения и направление движения частицы. Разобьём траекторию на участки  , каждому из которых соответствует перемещение
, каждому из которых соответствует перемещение  (рис. 1.9). По определению
(рис. 1.9). По определению
Таким образом, скорость есть производная радиус-вектора частицы по времени. Перемещение  совпадает с бесконечно малым элементом траектории. Следовательно, вектор
совпадает с бесконечно малым элементом траектории. Следовательно, вектор  направлен по касательной к траектории.
направлен по касательной к траектории.
 Модуль скорости
Модуль скорости  . При
. При 
 , тогда
, тогда
|
т.е. модуль скорости равен производной пути по времени.
Вектор скорости, как и любой вектор, можно выразить через его компоненты  ,
,  ,
,  :
:

Модуль скорости: 
Свяжем компоненты скорости с компонентами радиус-вектора
 , производная:
, производная:
 ,
, 
сравнивая выражения и для , получим:
т.е. проекции вектора скорости на координатные оси равны производным по времени соответствующих координат движущейся частицы.
Ускорение – векторная величина, характеризующая изменение скорости по величине и направлению. По определению ускорения  :
:
Легко показать (читатель сам может это проверить), что
 ,
,
 ,
,
 .
.
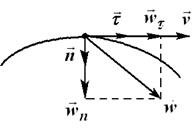 4. Радиус кривизны траектории. Можно показать, что в общем случае при движении по криволинейной траектории с переменной скоростью вектор ускорения можно представить в виде:
4. Радиус кривизны траектории. Можно показать, что в общем случае при движении по криволинейной траектории с переменной скоростью вектор ускорения можно представить в виде:  , или
, или
 ,
,
где


Первое слагаемое – тангенциальное ускорение  , характеризующее изменение скорости по абсолютной величине, где
, характеризующее изменение скорости по абсолютной величине, где  – единичный вектор, направленный по касательной к траектории (
– единичный вектор, направленный по касательной к траектории (  ) (рис. 1.10).
) (рис. 1.10).
 Второе слагаемое
Второе слагаемое  – нормальное (центростремительное ускорение), характеризующее изменение скорости по направлению, где
– нормальное (центростремительное ускорение), характеризующее изменение скорости по направлению, где  – единичный вектор нормали, направленный перпендикулярно скорости и по модулю равный единице:
– единичный вектор нормали, направленный перпендикулярно скорости и по модулю равный единице:  ;
;  – радиус кривизны, представляющий собой радиус окружности, которая сливается в данном месте с кривой на бесконечно малом её участке. Центр такой окружности называется центром кривизны для данной точки кривой (рис. 1.11).
– радиус кривизны, представляющий собой радиус окружности, которая сливается в данном месте с кривой на бесконечно малом её участке. Центр такой окружности называется центром кривизны для данной точки кривой (рис. 1.11).
Пример решения задачи на кинематику поступательного движения материальной точки.
Дано:
 м м
| Решение:
= 
 = =   , ,
  . .
|
Найти:
 , ,  , , 
|
Вопросы для самоконтроля
1. Дайте определения скалярного и векторного произведения векторов.
2. Что такое радиус-вектор?
3. Какое движение называется поступательным?
4. В чём заключается принцип Галилея? Что устанавливают преобразования Галилея?
5. Что такое скорость? Как найти модуль скорости?
6. Какова ориентация векторов тангенциального и нормального ускорений? Запишите соответствующие выражения для них.
Лекция № 2
Дата добавления: 2016-12-27; просмотров: 4124;
Поиск по сайту
Узнать еще
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- Інвестиції: сутність, фактори, які впливають на їх величину
- Індекси середніх величин.
- Абсолютні статистичні величини та одиниці їх вимірювання
- Абсолютная величина и норма матрицы.
- Абсолютные и относительные величины
- Абсолютные и относительные величины.
- Абсолютные статистические величины

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
