Системы дистанционной передачи показаний.
Системы дистанционной передачи показаний включают в себя передающий преобразователь, канал связи и приёмное устройство. Системы дистанционной передачи показаний по виду используемой энергии разделяют на электрические и пневматические.
Электрические системы дистанционной передачи показаний бывают реостатные, индукционные, дифференциально-трансформаторные, ферродинамические и токовые.
Передавать на расстояние можно непосредственно измеряемую величину или пропорциональную ей другую величину.
Различные неэлектрические величины можно преобразовывать в электрические у места измерения и передавать на расстояние.
Находящиеся у места измерения устройства, в которых различные неэлектрические величины преобразуются в электрические, называются первичными приборами или датчиками.
Приборы, измеряющие величины, передаваемые датчиками, называются вторичными приборами. 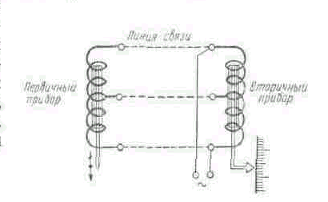
Индукционный мост состоит (рис. 22) из двух одинаковых катушек, разделенных на две секции. Внутри катушек могут перемещаться стальные сердечники. Одна катушка монтируется в первичном приборе, вторая — в следящем. Катушки соединяются между собой, как это показано на рисунке, и питаются от источника переменного тока. Сердечник первой катушки связан с подвижной частью первичного прибора, а сердечник второй—с указателем следящего прибора.
Если сердечники обеих катушек занимают одинаковые положения по отношению к секциям, то индуктивные сопротивления соответствующих секций равны и мост находится в равновесии (тока в среднем проводе нет).
Перемещение сердечника катушки первичного прибора приводит к изменению индуктивного сопротивления одной из секций этой катушки. Токи в секциях перераспределяются таким образом, что увеличивается втягивающее усилие соответствующей секции катушки следящего прибора. Если, например, сердечник в показывающем приборе переместился вверх, то токи уменьшаются в верхней секции первой катушки и нижней секции второй катушки и увеличиваются в верхней секции второй катушки и нижней секции первой. Через средний провод будет протекать так называемый уравнительный ток.
Сердечник катушки следящего прибора начинает перемещаться в сторону секции с большим током, передавая свое движение стрелке. По мере перемещения сердечника индуктивное сопротивление соответствующей секции будет возрастать, а ток и втягивающее усилие уменьшаться.
Движение прекратится, когда сердечник катушки вторичного прибора займет положение, соответствующее положению сердечника первой катушки. Так, посредством индукционного моста осуществляется дистанционная передача показаний прибора.
 Пневматическая система передачи показаний нашла широкое применение в химических, нефтехимических и других пожаро и взрывоопасных производствах. Она состоит из преобразователей с унифицированным выходным сигналом 0,2—1,0 кгс/см2 и ряда вторичных приборов, предназначенных для индикации и регистрации измеряемых величин в виде пневматического сигнала, изменяющегося в тех же пределах.
Пневматическая система передачи показаний нашла широкое применение в химических, нефтехимических и других пожаро и взрывоопасных производствах. Она состоит из преобразователей с унифицированным выходным сигналом 0,2—1,0 кгс/см2 и ряда вторичных приборов, предназначенных для индикации и регистрации измеряемых величин в виде пневматического сигнала, изменяющегося в тех же пределах.
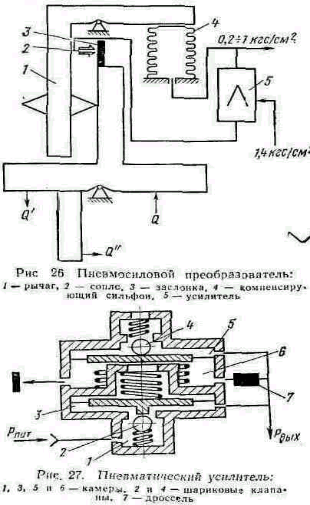
В пневмосиловом преобразователе (рис.26) усилие, развиваемое чувствительным элементом, поворачивает основной рычаг вокруг оси против часовой стрелки. При этом заслонка 3 приближается к соплу 2, из которого свободно истекает сжатый воздух. Сопло 2 питается от усилителя 5 через капиллярное отверстие, поэтому приближение или удаление заслонки от сопла на несколько микрон вызывает резкое изменение давления в линии сопла. Комплект, состоящий из сопла и заслонки, называют реле «сопло-заслонка». Изменение сигнала на выходе реле воспринимает усилитель 5, который изменяет давление в компенсирующем сильфоне 4 так, что усилие, развиваемое сильфоном и передаваемое на рычаг 1 и на основной рычаг, уравновешивается усилием, развиваемым чувствительным элементом.
Принципиальная схема пневматического усилителя представлена на рис. 27. Питающий воздух давлением 1,4 кгс/см2 поступает в камеру 1, из которой через шариковый клапан 2 воздух поступает в камеру 3, соединенную с выходной линией и камерой 5. Через капиллярное отверстие 7 (дроссель) воздух поступает в камеру 6 и в линию сопла. Камера 5 может сообщаться с атмосферой через шариковый клапан 4.
Усилитель работает следующим образом. При изменении (например, увеличении) усилия, развиваемого чувствительным элементом, основной рычаг прикроет сопло и давление в камере 6 тоже изменится (увеличится).
Мембрана, разделяющая камеры 5 и 6, переместится вверх и прикроет шариковый клапан 4. Одновременно мембрана в камере 3 переместится вниз и откроет клапан подачи воздуха на выход усилителя. Выходное давление будет расти до тех пор, пока усилие, которое развивает компенсирующий сильфон, соединенный с выходом преобразователя, не станет равным усилию, приложенному к основному рычагу.
Дата добавления: 2016-12-16; просмотров: 6283;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
