Пневматические, электрические преобразователи.
Принцип действия пневматических преобразователей (рис. 4, а) основан на пневматической силовой компенсации. Измеряемая величина воздействует на чувствительный элемент измерительного блока 8 и преобразуется в усилие Р, которое через рычажную систему 1пневмосилового преобразователя уравновешивается усилием Рос сильфона обратной связи. При изменении измеряемой величины и усилия Р происходит незначительное перемещение рычажной системы и связанной с ней заслонки 4. Чувствительный индикатор рассогласования 5 типа «сопло-заслонка» преобразует это перемещение в управляющий сигнал давления сжатого воздуха, поступающий на вход пневматического усилителя 6.
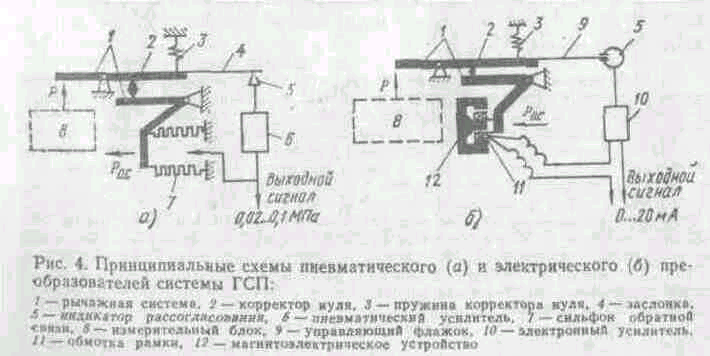 Выходной сигнал усилителя поступает в линию дистанционной передачи и одновременно в сильфон обратной связи 7 пневмосилового преобразователя, где преобразуется в пропорциональное усилие Ро.с, которое через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является значение выходного сигнала преобразователя, необходимое для создания уравновешивающего усилия обратной связи Р о.с. Пределы изменения выходного сигнала 0,02—0,1 МПа. Настраивают преобразователь корректором нуля 2, а начальное значение выходного сигнала преобразователя (0,02 МПа) устанавливают с помощью пружины 3 корректора нуля.
Выходной сигнал усилителя поступает в линию дистанционной передачи и одновременно в сильфон обратной связи 7 пневмосилового преобразователя, где преобразуется в пропорциональное усилие Ро.с, которое через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является значение выходного сигнала преобразователя, необходимое для создания уравновешивающего усилия обратной связи Р о.с. Пределы изменения выходного сигнала 0,02—0,1 МПа. Настраивают преобразователь корректором нуля 2, а начальное значение выходного сигнала преобразователя (0,02 МПа) устанавливают с помощью пружины 3 корректора нуля.
Питание пневматических преобразователей производят очищенным от пыли, влаги и масла воздухом, номинальное избыточное давление которого 0,14 МПа. Тип МС-П
Принцип действия электрических преобразователей (рис. 4, б) основан на электрической силовой компенсации. Измеряемая величина (например, давление, расход) воздействует на чувствительный элемент измерительного блока и преобразуется в усилие Р, которое через рычажную систему 1 электросилового преобразователя уравновешивается усилием Ро.с магнитоэлектрического устройства обратной связи.
При изменении измеряемой величины и усилия Р происходит незначительное (микронное) перемещение рычажной системы и связанного с ней управляющего флажка 9 индикатора рассогласования 5. Индикатор рассогласования дифференциально-трансформаторного типа преобразует это перемещение в управляющий сигнал (напряжение переменного тока), поступающий на вход электронного усилителя 10.
Выходной сигнал постоянного тока усилителя поступает в линию дистанционной передачи и одновременно в последовательно соединенную с ней обмотку 11 рамки магнитоэлектрического устройства 12 электросилового преобразователя, где преобразуется в усилие обратной связи Ро.с. Это усилие через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является постоянный ток, необходимый для создания уравновешивающего усилия обратной связи Ро.с. Пределы изменения выходного сигнала постоянного тока 0—20 ,0—5, 4-20 мА.
Настраивают преобразователь изменением передаточного отношения рычажной системы путем перемещения корректора нуля 2. Начальное значение, выходного сигнала преобразователя устанавливают с помощью пружины 3 корректора нуля.
Дата добавления: 2016-12-16; просмотров: 4502;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
