Конструктивные особенности современных ПЛК
Программируемый контроллер – это программно управляемый дискретный автомат, имеющий некоторое множество входов, подключенных посредством датчиков к объекту управления, и множество выходов, подключенных к исполнительным устройствам.
Сущность функционирования – ПЛК контролирует состояния входов и вырабатывает определенные последовательности программно заданных действий, отражающихся в изменении выходов.
В современных ПЛК предусматриваются дискретные и аналоговые входы-выходы. Дискретные входы-выходы имеют стандартные характеристики уровней сигналов. Аналоговые входы-выходы контроллеров могут иметь различные параметры и возможности, причем аналоговые сигналы, вводимые в ПЛК, обязательно преобразуются в цифровую, то есть в дискретную форму представления.
К параметрам аналоговых сигналов относятся: разрядность аналого-цифрового преобразования (АЦП), диапазон изменений входного сигнала, время преобразования, вид входа (несимметричный или дифференциальный), метод преобразования и нелинейность характеристики преобразования, уровень шума и наличие фильтрации, возможность автоматической калибровки, программная или аппаратная регулировка коэффициента усиления. Особые классы аналоговых входов представляют входы, предназначенные для подключения термометров сопротивления и термопар. Здесь требуется применение специальной аппаратной поддержки (трехточечное включение, источники образцового тока, схемы компенсации холодного спая, схемы линеаризации и т. д.).
Помимо «классических» дискретных и аналоговых входов-выходов многие ПЛК имеют специализированные входы-выходы. Они ориентированы на работу с конкретными специфическими устройствами, требующими определенных уровней сигналов, питания и специальной обработки. Примерами таких устройств являются квадратурные шифраторы, блоки управления шаговыми двигателями, блоки подключения индуктосинов и т.д.
Аналоговые входы-выходы ПЛК не обязательно должны быть физически сосредоточены в общем корпусе с процессорным ядром. Все большую популярность приобретают технические решения, позволяющие полностью отказаться от прокладки кабелей для аналоговых цепей. С этой целью входы-выходы выполняются в виде миниатюрных модулей, расположенных в непосредственной близости от датчиков и исполнительных механизмов. Соединение этих модулей с ПЛК выполняется посредством одного общего цифрового кабеля. Например, в интерфейсе ASI (Actuators/Sensors interface) применяется плоский профилированный кабель («желтый кабель») для передачи данных и питания всего по двум проводам.
Для контроллеров, выполняющих математические операции, характеристикой качества работы является правильность найденного решения.
В системах реального времени помимо правильности решения определяющую роль играет время реакции. Логически верное решение, полученное с задержкой более допустимой, не является приемлемым.
По времени реакции принято различать системы жесткого и мягкого реального времени. В системах жесткого реального времени существует определенный временной порог. Если этот будет превышен, наступят необратимые катастрофические последствия – система станет неработоспособной. В системах мягкого реального времени с увеличением времени управляющей реакции происходит ухудшение характеристик системы, но ничего катастрофического при этом не происходит.
Классический подход для решения задач жесткого реального времени базируется на построении событийно управляемой системы. Такая система представляет собой простой асинхронный автомат. В этой системе для каждого события устанавливается четко определенное время реакции. Недостатком событийно управляемой системы является сложность её практической реализации и необходимость тщательной проработки и моделирования.
Современный подход базируется на использовании метода периодического опроса входных данных – метода сканирования. Сущность метода сканирования заключается в том, что в некотором временном интервале, называемом циклом, ПЛК опрашивает входы, выполняет пользовательскую программу и устанавливает необходимые значения выходов. При этом прикладная программа может быть реализована в виде множества логически независимых задач, которые ПЛК должен решать одновременно.
Так как обычный ПЛК имеет один процессор, то выполнение нескольких задач осуществляется псевдопараллельно, последовательными порциями. В связи с этим время реакции на событие оказывается зависящим от числа одновременно обрабатываемых событий. Число одновременно обрабатываемых событий – величина переменная. Добавление новых задач увеличит как количество обрабатываемых событий, так и время на выполнение пользовательской программы. Однако, если проанализировать все события, то среди них можно найти такие, время реакции на которые допускается увеличить. Такая модель позволяет организовать системы жесткого и мягкого реального времени. Следует учесть, что современные ПЛК имеют типовое значение времени рабочего цикла, измеряемое единицами миллисекунд и менее. За это время ПЛК может выполнить значительный объем процедур и сформировать результаты обработки информации по быстрым процессам. Поскольку время реакции большинства исполнительных устройств значительно выше (десятки миллисекунд), то процесс подготовки данных на эти устройства может быть распределен на несколько циклов. Поэтому с реальными ограничениями ПЛК по времени сталкиваются редко.
В некоторых случаях ограничением служит не время реакции на событие, а обязательность его фиксации, например работа с датчиками, формирующими импульсы малой длительности. Это ограничение преодолевается специальной конструкцией входов – применением счетных входов, которые позволяют фиксировать и подсчитывать импульсы с периодом во много раз меньшим времени рабочего цикла ПЛК. В составе ПЛК предусматривается также встраивание интеллектуальных модулей, которые позволяют автономно отрабатывать заданные функции. Примером интеллектуального модуля является, например, модуль управления сервоприводом.
Рабочий цикл ПЛК
Задачи управления требуют непрерывного циклического контроля. В цифровых устройствах непрерывность достигается за счет применения дискретных алгоритмов, циклически повторяющихся через достаточно малые промежутки времени.
Одна итерация, включающая замер, расчет и выработку воздействия, называется рабочим циклом ПЛК. Выполняемые действия определяются пользовательской программой и зависят от значения входов контроллера и его текущего состояния.
При включении питания ПЛК запускается программа самотестирования, после выполнения которой производится настройка аппаратных ресурсов (инициализация), очистка оперативной памяти данных, а также осуществляется контроль целостности прикладной программы пользователя. Если прикладная программа сохранена в памяти, ПЛК переходит к основной работе, которая состоит из постоянного повторения последовательности действий, входящих в рабочий цикл.
Рабочий цикл ПЛК состоит из нескольких фаз.
1. Начало цикла – чтение состояния входов.
2. Выполнение кода программы пользователя.
3. Запись состояния выходов.
4. Обслуживание аппаратных ресурсов ПЛК.
5. Мониторинг системы исполнения.
6. Контроль времени цикла.
7. Переход на начало цикла.
В начале цикла ПЛК производит физическое чтение входов. Считанные значения размещаются в области памяти входов. Таким образом, создается полная одномоментная зеркальная копия значений входов.
Далее выполняется код пользовательской программы. Пользовательская программа работает с копией значений входов и выходов, размещенной в оперативной памяти. Если прикладная программа не загружена или остановлена, то данная фаза рабочего цикла не выполняется.
При выполнении пользовательской программы должны быть определены новые значения выходов и новое состояние ПЛК, в котором пользовательская программа представит новый алгоритм вычисления значений выходов. Следует учесть, что физические выходы ПЛК будут приведены в соответствие с расчетными значениями только в фазе записи состояния выходов.
Фаза записи состояния выходов представляет собой процесс копирования информации из области выходов оперативной памяти в регистры модулей вывода контроллера. При этом обеспечивается привязка переменных, записанных в памяти, к выводам модуля. Эта привязка осуществляется при конфигурировании контроллера в системе.
Обслуживание аппаратных ресурсов подразумевает обеспечение работы системных таймеров, часов реального времени, оперативное самотестирование, индикацию состояния и другие аппаратно-зависимые задачи.
Мониторинг системы исполнения включает большое число функций, необходимых для взаимодействия с системой программирования, сервером данных и сетью. Мониторинг понимается как систематический сбор и обработка информации, которая может быть использована для улучшения процесса принятия решения.
В функции системы исполнения обычно включается: загрузка кода программы в оперативную память, управление последовательностью выполнения задач, отображение процесса выполнения программ, пошаговое выполнение, обеспечение просмотра и редактирования значений переменных, фиксация и трассировка значений переменных, контроль времени цикла и т. д.
Пользовательская программа работает только с мгновенной копией входов. Таким образом, значения входов в процессе выполнения пользовательской программы не изменяются в пределах одного рабочего цикла. Это фундаментальный принцип построения ПЛК сканирующего типа. Такой подход исключает неоднозначность алгоритма обработки данных в различных его ветвях. Однако в некоторых случаях, например, при обработке АЦП, чтение входов может быть выполнено с использованием прерывания. Для прикладного программиста это не имеет значения, главное – это то, что значения входов должны быть обновлены автоматически в начале каждого рабочего цикла.
Общая продолжительность рабочего цикла ПЛК называется временем сканирования. Это время определяется длительностью фазы кода пользовательской программы. Время, занимаемое прочими фазами рабочего цикла, практически является величиной постоянной. Для задачи среднего объема время распределится примерно так: 98% – пользовательская программа, 2% – все остальное.
Существуют задачи, в которых не допускается плавающее время цикла, например, задачи автоматического регулирования. В таких задачах предусмотрен контроль времени цикла. Если отдельные ветви кода управляющей программы выполняются слишком быстро, в рабочий цикл добавляется искусственная задержка. Если контроль времени цикла не предусмотрен, подобные задачи приходится решать исключительно по таймерным меткам.
При определении времени цикла важную роль играет время реакции системы на изменение состояния одного из её входов. Очевидно, что момент возникновения события может быть смещен относительно начала фазы чтения входов. Если изменение значений входов произошло непосредственно перед фазой чтения входов, то время реакции будет наименьшим и равным времени сканирования (рис. 2.1).
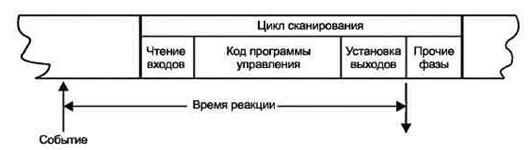
Рисунок 2.1 – Схема определения времени реакции на событие
Худший случай будет тогда, когда изменение значений входов происходит сразу после фазы чтения входов. Тогда время реакции будет наибольшим, равным удвоенному времени сканирования минус время одного чтения входов. Однако, время реакции ПЛК не превышает удвоенного времени сканирования.
Помимо времени реакции ПЛК, существенное значение имеет время реакции датчиков и исполнительных механизмов, которое также необходимо учитывать при оценке необходимой длительности рабочего цикла. Следует учесть, что существуют ПЛК, которые реализуют команды непосредственного доступа к аппаратуре входов и выходов, что позволяет обрабатывать и формировать отдельные сигналы с интервалами меньшей длительности рабочего цикла.
Для уменьшения времени реакции сканирующих контроллеров алгоритм программы разбивается на задачи с различным периодом исполнения. При этом пользователь получает возможность создавать отдельные программы, исполняемые по прерыванию, помимо кода, исполняемого в рабочем цикле.
Время цикла сканирования является базовым показателем быстродействия ПЛК. Ориентировочно о скорости обработки различных типов данных можно судить по тактовой частоте и разрядности центрального процессора.
Дата добавления: 2016-12-09; просмотров: 4241;
Поиск по сайту
Узнать еще
- I. ОСОБЕННОСТИ ДЕЛОВОГО И ЛИЧНОСТНОГО ОБЩЕНИЯ В СОВМЕСТНОЙ ДЕЯТЕЛЬНОСТИ
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- I2. Особенности аэродинамики несущего винта (НВ)
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла
- II. Особенности политического устройства Ирана
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения
- II. РЕЖИМ И ОСОБЕННОСТИ ЛИЧНОЙ ГИГИЕНЫ
- III. Особенности политической элиты России.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
