I2. Особенности аэродинамики несущего винта (НВ)
Общие положения.
Несущий винт вертолета (НВ) предназначен для создания подъемной силы, движущей (пропульсивной) силы и управляющих моментов.
Несущий винт состоит из втулки, лопастей, которые крепятся к втулке с помощью шарниров или упругих элементов.
Лопасти несущего винта, благодаря наличию на втулке трех шарниров (горизонтального, вертикального и осевого), совершают в полете сложное движение: - вращаются вокруг оси НВ, перемещаются вместе с вертолетом в пространстве, изменяют свое угловое положение, поворачиваясь в указанных шарнирах, поэтому аэродинамика лопасти несущего винта сложнее аэродинамики крыла самолета.
Характер обтекания НВ зависит от режимов полета.
Основные геометрические параметры несущего винта (НВ).
Основными параметрами НВ являются диаметр, ометаемая площадь, число лопастей, коэффициент заполнения, разнос горизонтального и вертикального шарниров, удельная нагрузка на ометаемую площадь.
Диаметр D – диаметр окружности по которой движутся концы лопастей при работе НВ на месте. У современных вертолетов диаметр составляет 14-35 м.
Ометаемая площадь Fом – площадь круга, который описывают концы лопастей НВ при его работе на месте.
Коэффициент заполнения σ.равен:
σ = (Zл Fл ) / Fом (12.1);
где Zл – количество лопастей;
Fл – площадь лопасти;
Fом – ометаемая площадь НВ.
Характеризует степень заполнения лопастями ометаемой площади, изменяется в пределах s=0,04¸0,12.
При увеличении коэффициента заполнения тяга НВ растет до определенного значения, в связи с увеличением реальной площади несущих поверхностей, затем падает. Падение тяги происходит из-за влияния скоса потока и вихревого следа от идущей впереди лопасти. При увеличении s, необходимо увеличить и мощность, подводимую к НВ из-за увеличения лобового сопротивления лопастей. При увеличении s уменьшается шаг, необходимый для получения заданной тяги, что отдаляет НВ от срывных режимов. Характеристика срывных режимов и причины их возникновения будут рассмотрены далее.
Разнос горизонтального lг и вертикального lв шарниров – расстояние от оси шарнира до оси вращения НВ. Может рассматриваться в относительных величинах  (12.2.)
(12.2.)
Находится в пределах  . Наличие разноса шарниров улучшает эффективность продольно-поперечного управления.
. Наличие разноса шарниров улучшает эффективность продольно-поперечного управления.
Удельная нагрузка на ометаемую площадь определяется как отношение веса вертолета к площади ометаемого НВ.
 (12.3.)
(12.3.)
Основные кинематические параметры НВ.
К основным кинематическим параметрам НВ относятся частота или угловая скорость вращения, угол атаки НВ, углы общего или циклического шага.
Частота вращения nс - число оборотов НВ в секунду; угловая скорость вращения НВ -  определяет его окружную скорость wR.
определяет его окружную скорость wR.
Величина wR на современных вертолетах равна 180¸220 м/сек.
Угол атаки НВ (А) измеряется между вектором скорости набегающего потока и с 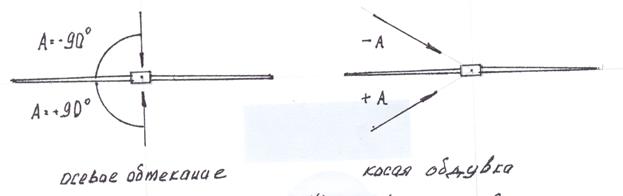 Рис. 12.1 Углы атаки несущего винта и режимы его работы.
Рис. 12.1 Углы атаки несущего винта и режимы его работы.
плоскостью вращения НВ (рис.12.1). Угол А считается положительным, если воздушный поток набегает на НВ с низу. На режимах горизонтального полёта и набора высоты А -отрицательный, на снижении А- положительный.. Различают два режима работы НВ – режим осевого обтекания, когда А=±900 (висение, вертикальный набор или снижение) и режим косой обдувки, когда А¹±900.
Угол общего шага – угол установки всех лопастей НВ в сечении на радиусе 0,7R.
Угол циклического шага НВ зависит от режима работы НВ, подробно этот вопрос рассматривается при анализе косой обдувки НВ.
Основные параметры лопасти НВ.
К основным геометрическим параметрам лопасти относятся радиус, хорда, угол установки, форма профиля сечений, геометрическая крутка и форма лопасти в плане.
Текущий радиус сечения лопасти r определяет его расстояние от оси вращения НВ. Относительный радиус определяется
 (12.4);
(12.4);
Хорда профиля – прямая соединяющая наиболее удаленные точки профиля сечения, обозначается b (рис. 12.2).
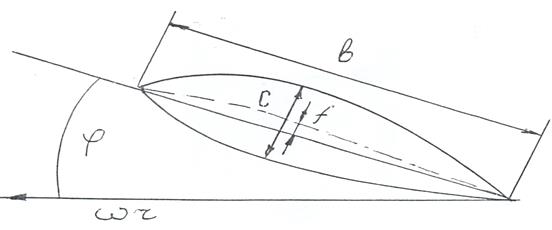
Рис. 12.2. Параметры профиля лопасти. Угол установки лопасти j - угол между хордой сечения лопасти и плоскостью вращения НВ.
Угол установки j на `r=0,7 при нейтральном положении органов управления и отсутствии махового движения считается углом установки всей лопасти и общим шагом НВ.
Профиль сечения лопасти представляет собой форму сечения плоскостью, перпендикулярной к продольной оси лопасти, характеризуется максимальной толщиной сmax, относительной толщиной  вогнутостью f и кривизной
вогнутостью f и кривизной  . На несущих винтах применяют, как правило, двояковыпуклые, несимметричные профили с небольшой кривизной.
. На несущих винтах применяют, как правило, двояковыпуклые, несимметричные профили с небольшой кривизной.
Геометрическая крутка производится уменьшением углов установки сечений от комля до конца лопасти и служит для улучшения аэродинамических характеристик лопасти.. Лопасти вертолетов имеют прямоугольную форму в плане, которая в аэродинамическом смысле не оптимальна, но проще с точки зрения технологии.
Кинематические параметры лопасти определяются углами азимутального положения, взмаха, качания и углом атаки.
Угол азимутального положения y определяется по направлению вращения НВ между продольной осью лопасти в данный момент времени и продольной осью нулевого положения лопасти. Линия нулевого положения в горизонтальном полете практически совпадает с продольной осью хвостовой балки вертолета.
Угол взмаха b определяет угловое перемещение лопасти в горизонтальном шарнире относительно плоскости вращения. Считается положительным при отклонении лопасти вверх.
Угол качания x характеризует угловое перемещение лопасти в вертикальном шарнире в плоскости вращения (рис.12.). Считается положительным при отклонении лопасти против направления вращения.
Угол атаки элемента лопасти a определяется углом между хордой элемента и набегающим потоком.
Лобовое сопротивление лопасти.
Лобовым сопротивлением лопасти называется аэродинамическая сила, действующая в плоскости вращения втулки и направленная против вращения НВ.
Лобовое сопротивление лопасти состоит из профильного, индуктивного и волнового сопротивлений.
Профильное сопротивление, вызывается двумя причинами: разностью давления перед лопастью и за ней (сопротивление давления) и трением частиц в пограничном слое (сопротивление трения).
Сопротивление давления зависит от формы профиля лопасти т.е. от относительной толщины (  ) и относительной кривизны (
) и относительной кривизны (  ) профиля. Чем больше и тем больше сопротивление. Сопротивление давления не зависит от угла атаки на эксплуатационных режимах, но возрастает на критических a.
) профиля. Чем больше и тем больше сопротивление. Сопротивление давления не зависит от угла атаки на эксплуатационных режимах, но возрастает на критических a.
Сопротивление трения зависит от частоты вращения НВ и состояния поверхности лопастей. Индуктивное сопротивление – это сопротивление, вызванное наклоном истинной подъемной силы вследствие скоса потока. Индуктивное сопротивление лопасти зависит от угла атаки α и возрастает с его увеличением. Волновое сопротивление возникает на наступающей лопасти при превышении скорости полёта выше расчетной и появлении на лопасти скачков уплотнения.
Лобовое сопротивление, как и сила тяги, зависит от плотности воздуха.
Импульсная теория создания тяги несущего винта.
Физическая сущность импульсной теории заключается в следующем. Работающий идеальный винт отбрасывает воздух, предавая его частицам определенную скорость. Перед винтом образуется зона подсасывания, за винтом – зона отбрасывания и устанавливается воздушный поток через винт. Основные параметры этого воздушного потока: индуктивная скорость и прирост давления воздуха в плоскости вращения винта.
На режиме осевого обтекания воздух подходит к НВ со всех сторон, а за винтом образуется сужающая воздушная струя. На рис. 12.4. изображена достаточно большая сфера с центром на втулке НВ с тремя характерными сечениями : сечение 0, расположенное далеко перед винтом, в плоскости вращения винта сечение 1 со скоростью потока V1 (скорость подсасывания) и сечение 2 со скоростью потока V2 (скорость отбрасывания).
Поток воздуха отбрасывается НВ с силой Т, но и воздух давит на винт с этой же силой. Эта сила и будет силой тяги несущего винта. Сила равна произведению массы тела на 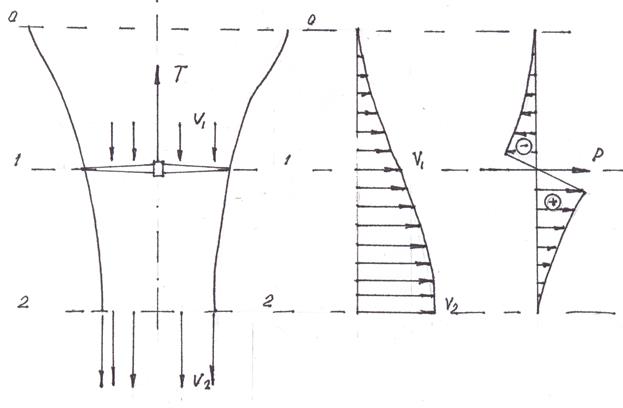 Рис. 12.3. К объяснению импульсной теории создания тяги.
Рис. 12.3. К объяснению импульсной теории создания тяги.
ускорение, которое тело получило под действием этой силы. Следовательно, тяга НВ будет равна
 (12.5.)
(12.5.)
где ms – секундная масса воздуха, проходящая через площадь НВ равная
 ( 12.6.)
( 12.6.)
где  - плотность воздуха;
- плотность воздуха;
F - площадь, отметаемая винтом;
V1 - индуктивная скорость потока (скорость подсасывания);
а – ускорение в потоке.
Формулу (12.5.) можно представить в другом виде
 (12.7.)
(12.7.)
так как по теории идеального винта скорость отбрасывания воздуха V  винтом в два раза больше скорости подсасывания V1 в плоскости вращения НВ.
винтом в два раза больше скорости подсасывания V1 в плоскости вращения НВ.
 (12.8.)
(12.8.)
Практически удвоение индуктивной скорости происходит на расстоянии равном радиусу НВ. Скорость подсасывания V1 у вертолетов Ми-8 равна 12м/с, у Ми-2 – 10м/с.
Вывод: Сила тяги несущего винта пропорциональна плотности воздуха, ометаемой площади НВ и индуктивной скорости (частоте вращения НВ).
Перепад давления в сечении 1-2 по отношению к атмосферному давлению в невозмущенной воздушной среде равен трем скоростным напорам индуктивной скорости
 (12.9.)
(12.9.)
что вызывает увеличение сопротивления элементов конструкции вертолета, находящимися за НВ.
Теория элемента лопасти.
Сущность теории элемента лопасти заключается в следующем. Рассматривается обтекание каждого малого участка элемента лопасти, и определяются элементарные аэродинамические силы dуэ и dхэ действующие на лопасть. Подъемная сила лопасти Ул и сопротивление лопасти Хл определяются в результате сложения таких элементарных сил, действующих по всей длине лопасти от ее комлевого сечения (rк) до концевого (R):
Аэродинамические силы действующие на несущий винт определяются как сумма сил действующих на все лопасти.
Для определения тяги несущего винта пользуются формулой аналогичной формуле подъемной силы крыла.
 (12.10.)
(12.10.)
Согласно теории элемента лопасти, сила тяги развиваемая несущим винтом, пропорциональна коэффициенту тяги, ометаемой площади НВ, плотности воздуха и квадрату окружной скорости конца лопастей.
Выводы сделанные по импульсной теории и по теории элемента лопасти взаимно дополняют друг друга.
На основании этих выводов следует, что сила тяги НВ в режиме осевого обтекания зависит от плотности воздуха (температуры), установочного угла лопастей (шага НВ) и частоты вращения несущего винта.
Режимы работы НВ.
Режим работы несущего винта определяется положением НВ в потоке воздуха.(рис.12.1) В зависимости от этого определяют два основных режима работы: режим осевого и косого обтекания. Режим осевого обтекания характеризуется тем, что набегающий невозмущённый поток двигается параллельно оси втулки НВ (перпендикулярно плоскости вращения втулки НВ). В этом режиме несущий винт работает на вертикальных режимах полёта: висение, вертикальный набор высоты и снижение вертолёта. Основной особенностью этого режима является то, что положение лопасти относительно потока, набегающего на винт, не меняется, следовательно, не меняются аэродинамические силы при движении лопасти по азимуту. Режим косого обтекания характеризуется тем, что воздушный поток набегает на НВ под углом к его оси (рис12.4.). Воздух подходит к винту со скоростью V и отклоняется вниз за счет индуктивной скорости подсасывания Vi. Результирующая скорость потока через НВ будет равна векторной сумме скоростей невозмущенного потока и индуктивной скорости
V1 = V + Vi (12.11.)
В результате этого увеличивается секундный расход воздуха протекающий через НВ, а следовательно, и тяга несущего винта, которая увеличивается с ростом скорости полета. Практически рост тяги НВ наблюдается при скорости свыше 40 км/ч.
Рис. 12.4. Работа несущего винта на режиме косой обдувки.
Косая обдувка. Эффективная скорость обтекания элемента лопасти в плоскости вращения НВ и ее изменение по ометаемой поверхности НВ.
На режиме осевого обтекания каждый элемент лопасти находится в потоке, скорость которого равна окружной скорости элемента  , где
, где  радиус данного элемента лопасти (Рис.12.6).
радиус данного элемента лопасти (Рис.12.6).
На режиме косого обтекания при угле атаки НВ не равном нулю (А=0) результирующая скорость W, с которой поток обтекает элемент лопасти, зависит от окружной скорости элемента u, скорости полета V1 и угла азимута  .
.
W = u +V1 sinψ (12.12.)
т.е. при неизменной скорости полета и постоянной частоте вращения НВ (ωr = const.) эффективная скорость обтекания лопасти будет меняться в зависимости от угла азимута.
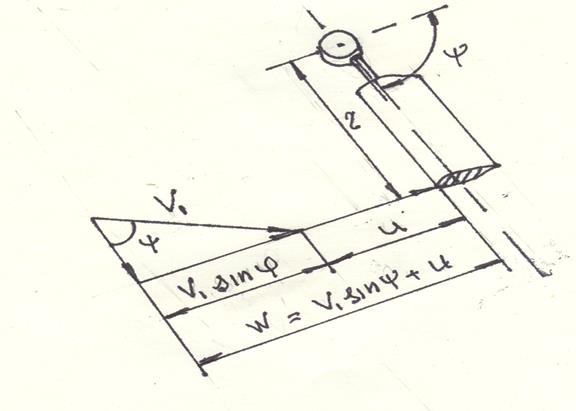 Рис.12.5. Изменение скорости обтекания лопасти в плоскости вращения ВВ.
Рис.12.5. Изменение скорости обтекания лопасти в плоскости вращения ВВ.
Изменение эффективной скорости обтекания по ометаемой поверхности НВ.
На рис. 12.6. показаны векторы скоростей потока, который набегает на элемент лопасти в результате сложения окружной скорости и скорости полета. На схеме видно, что эффективная скорость обтекания изменяется как вдоль лопасти, так и по азимуту. Окружная скорость растёт от нуля у оси втулки винта до максимальной на концах лопастей. В азимуте 90о скорость элементов лопасти равна  , на азимуте 270о результирующая скорость равна
, на азимуте 270о результирующая скорость равна  , у комля лопасти в зоне с диаметром d поток набегает со стороны ребра обтекания, т.е. образуется зона обратного обтекания, зона, которая не участвует в создании тяги.
, у комля лопасти в зоне с диаметром d поток набегает со стороны ребра обтекания, т.е. образуется зона обратного обтекания, зона, которая не участвует в создании тяги.
Диаметр зоны обратного обтекания тем больше, чем больше радиус НВ и чем больше скорость полета при неизменной частоте вращения НВ.
На азимутах y=0 и y=1800 результирующая скорость элементов лопасти равна  .
.
Рис.12.6. Изменение эффективной скорости обтекания по ометаемой поверхности ВВ.
.
Косая обдувка. Аэродинамические силы элемента лопасти.
. При нахождении элемента лопасти в потоке возникает полная аэродинамическая сила элемента лопасти  , которая может быть разложена в скоростной системе координат на подъемную силу
, которая может быть разложена в скоростной системе координат на подъемную силу  и силу лобового сопротивления
и силу лобового сопротивления  .
.
Величина элементарной аэродинамической силы определяется по формуле:
Rr = CR(ρW²r/2)Sr (12.13.)
Просуммировав элементарные силы тяги и силы сопротивления вращению, можно определить величину силы тяги и сопротивления вращению всей лопасти.
Точка приложения аэродинамических сил лопасти является центром давления, который находится на пересечении полной аэродинамической силы с хордой лопасти.
Величина аэродинамической силы определяется углом атаки элемента лопасти  , который представляет собой угол между хордой элемента лопасти и набегающим потоком
, который представляет собой угол между хордой элемента лопасти и набегающим потоком  (Рис.12.7).
(Рис.12.7).
Угол установки элемента лопасти φ есть угол между конструктивной плоскостью несущего винта (КПВ) и хордой элемента лопасти.
Угол притекания  есть угол между скоростями
есть угол между скоростями  и .(Рис.12.7.)
и .(Рис.12.7.)
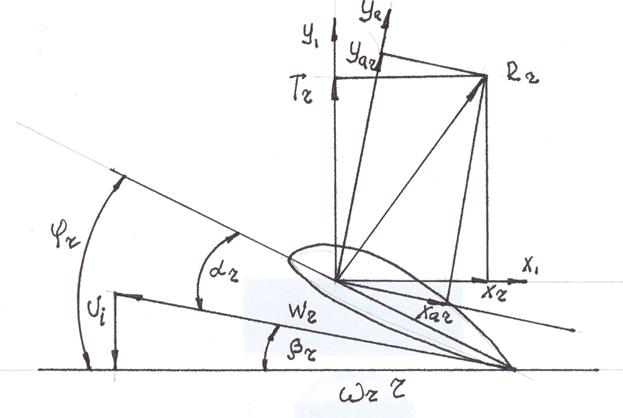
Рис.12.7.Аэродинамические силы элемента лопасти при косой обдувке.
Возникновение опрокидывающего момента при жестком креплении лопастей. Силы тяги создаются всеми элементами лопасти, но наибольшие элементарные силы Тл будут у элементов, расположенных на ¾ радиуса лопасти, величина равнодействующей Тл на режиме косого обтекания тяги лопасти зависит от азимута. На ψ = 90 она максимальна, на ψ = 270 минимальна. Такое распределение элементарных сил тяги и расположение равнодействующей силы приводит к образованию большого переменного изгибающего момента у корня лопасти Mизг.
Этот момент создает большую нагрузку в месте крепления лопасти, что может привести к её разрушению. В результате неравенства тяг Тл1 и Тл2 возникает опрокидывающий момент вертолета,
Мх=Тл1r1-Tл2r2, (12.14.)
который возрастает с увеличением скорости полета вертолета.
Винт с жестким креплением лопастей имеет следующие недостатки (Рис 12.8):
- наличие опрокидывающего момента на режиме косого обтекания;
- наличие большого изгибающего момента в месте крепления лопасти;
- изменение момента тяги лопасти по азимуту.
Эти недостатки устраняются путем крепления лопасти к втулке с помощью горизонтальных шарниров.
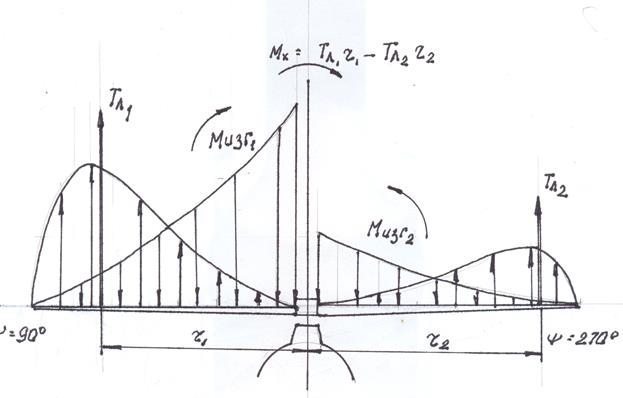
Рис.12.8 Возникновение опрокидывающего момента при жестком креплении лопастей.
Выравнивание момента силы тяги в различных азимутальных положениях лопасти.
При наличии горизонтального шарнира тяга лопасти образует относительно этого шарнира момент, который поворачивает лопасть (рис.12. 9). Момент тяги Тл1 (Тл2) вызывает поворот лопасти относительного этого шарнира
 или
или  (12.15.)
(12.15.)
поэтому момент не передается на втулку, т.е. устраняется опрокидывающий момент вертолета. Изгибающий момент Muзг. у корня лопасти становится равным нулю, разгружается ее корневая часть, уменьшается изгиб лопасти, за счет этого уменьшаются усталостные напряжения. Вибрации, вызванные изменением тяги по азимуту, уменьшаются. Таким образом, горизонтальный шарнир (ГШ) выполняет следующие функции:
- устраняет опрокидывающий момент на режиме косой обдувки;
- разгружает корневую часть лопасти от Mизг;
- упрощают управление несущим винтом;
- улучшают статическую устойчивость вертолета;
- уменьшают величину изменения тяги лопасти по азимуту.
- уменьшает усталостные напряжения в лопасти, и уменьшают ее вибрацию, из-за изменения силы тяги по азимуту;
Изменение углов атаки элемента лопасти за счет взмаха.
При движении лопасти в режиме косой обдувки в азимуте ψ от 0 до 90о скорость обтекания лопасти постоянно увеличивается за счет составляющей скорости горизонтального полета (при малых углах атаки НВ  ) (рис.12. 10.)
) (рис.12. 10.)
 т.е.
т.е.  . ( 12.16.)
. ( 12.16.)
Соответственно увеличивается сила тяги лопасти, которая пропорциональная квадрату скорости набегающего потока и момент тяги этой лопасти относительно горизонтального шарнира. Лопасть взмахивает вверх, 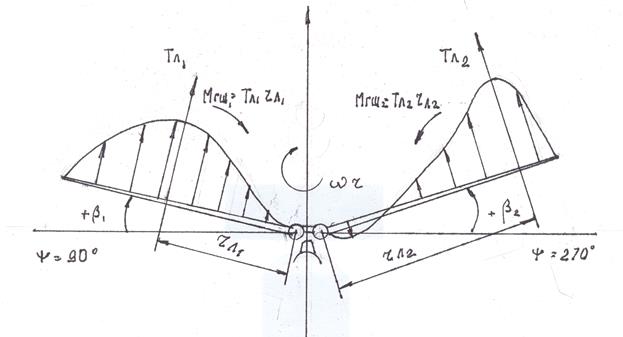 Рис12.9 Выравнивания момента силы тяги в различных азимутальных положениях лопасти.
Рис12.9 Выравнивания момента силы тяги в различных азимутальных положениях лопасти.
сечение лопасти дополнительно обдуваются сверху (рис. 12.10), а это вызывает уменьшение истинных углов атаки и уменьшение подъёмной силы лопасти, что приводит к аэродинамической компенсации взмаха. При движении от ψ 90 до ψ 180 скорость обтекания лопастей уменьшается, углы атаки увеличиваются. На азимуте ψ = 180о и на ψ = 0о скорости обтекания лопасти одинаковы и равны ωr.
К азимуту ψ = 270о лопасть начинает опускаться в связи с уменьшением скорости обтекания и уменьшением Тл, при этом лопасти дополнительно обдуваются снизу, что вызывает увеличение углов атаки элемента лопасти, а значит и некоторый прирост подъёмной силы.
На ψ = 270 скорость обтекания лопасти минимальна, мах Vy лопасти вниз максимальный, углы атаки на концах лопастей близки к критическим. Вследствие различия скорости обтекания лопасти на различных азимутах , углы атаки на ψ = 270о возрастают в несколько раз больше, чем уменьшаются при ψ = 90о. Поэтому при увеличении скорости полета вертолета, в районе азимута ψ = 270о углы атаки могут превышать критические значения, что вызывает срыв потока с элементов лопасти.
Косое обтекание приводит к тому, что углы взмаха лопастей в передней части диска НВ в районе азимута 1800 значительно больше, чем в задней части диска в районе азимута 00. Этот наклон диска называется завалом конуса НВ . Изменение углов взмаха лопасти по азимуту на свободном НВ, когда отсутствует регулятор взмаха, изменяются следующим образом:
азимут от 0 до 900:
- результирующая скорость обтекания лопасти растет, подъемная сила и ее момент увеличиваются;
- угол взмаха b и вертикальная скорость Vу увеличиваются;
азимут 900:
- скорость взмаха вверх Vу максимальная;
азимут 900 – 1800:
- подъемная сила лопасти уменьшается за счет уменьшения результирующей скорости обтекания;
- скорость взмаха Vу вверх уменьшается, но угол взмаха лопасти продолжает увеличиваться.
азимут 2000 – 2100:
- вертикальная скорость взмаха равна нулю Vу = 0, угол взмаха лопасти b - максимальный, лопасть , в результате уменьшения подъёмной силы, идёт вниз;
азимут 2700:
- скорость обтекания лопасти минимальная, подъемная сила и ее момент уменьшаются;
- скорость маха вниз Vу – максимальная;
- угол взмаха b уменьшается.
азимут 200 – 300:
- скорость обтекания лопасти начинает увеличиваться;
- Vу = 0, угол взмаха вниз – максимальный.
Таким образом, у свободного НВ правого вращения при косой обдувке конус заваливается назад влево. С ростом скорости полёта завал конуса увеличивается.

Рис.12.10.Изменение углов атаки элемента лопасти за счет взмаха.
Регулятор взмаха (РВ). Маховое движение приводит к росту динамических нагрузок на конструкцию лопасти и неблагоприятному изменению углов атаки лопастей по диску несущего винта. Уменьшение амплитуды взмаха и изменение естественного наклона конуса НВ с левого на правое производится регулятором взмаха. Регулятором взмаха (рис.12.11.) является кинематическая связь между осевым шарниром и вращающимся кольцом автомата перекоса, обеспечивающая уменьшение углов установки лопастей j при уменьшении угла взмаха b и наоборот, увеличение угла установки лопастей при увеличении угла взмаха. Эта связь заключается в смещении точки крепления тяги от автомата перекоса к поводку осевого шарнира (точка А) (рис.12.12) с оси горизонтального шарнира. На вертолетах типа Ми регулятор взмаха заваливает конус НВ назад и вправо. В этом случае боковая составляющая по оси Z от результирующей силы НВ направлена вправо против направления тяги рулевого винта, что улучшает условия боковой балансировки вертолета.
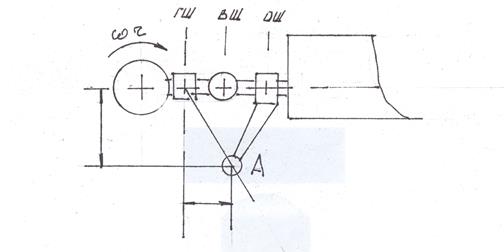
Рис.12.11 Регулятор взмаха, Кинематическая схема. . . Равновесие лопасти относительно горизонтального шарнира.
При маховом движении лопасти (рис.12.12.) в плоскости силы тяги на нее действуют следующие силы и моменты:
- тяга Тл, приложена на ¾ длины лопасти, образует момент Мт=Т·а, поворачивающий лопасть на увеличение взмаха;
- центробежная сила Fцб действующая перпендикулярно конструктивного оси вращения НВ во внешнюю сторону. Сила инерции от взмаха лопасти, направленная перпендикулярно оси лопасти и противоположна ускорению взмаха;
- сила тяжести  Gл приложена к центру тяжести лопасти и образует момент МG=G·в поворачивающий лопасть на уменьшение взмаха.
Gл приложена к центру тяжести лопасти и образует момент МG=G·в поворачивающий лопасть на уменьшение взмаха.
- лопасть занимает положение в пространстве вдоль результирующей силы Rл. Условия равновесия лопасти относительно горизонтального шарнира определяется выражением
 (12.17.)
(12.17.)
Рис.12.12. Силы и моменты, действующие на лопасть в плоскости взмаха.
Лопасти НВ движутся по образующей конуса, вершина которого расположена в центре втулки, а ось перпендикулярна к плоскости концов лопастей.
Каждая лопасть занимает на определенном азимуте Ψ одинаковые угловые положения βл относительно плоскости вращения НВ.
Маховое движение лопастей является циклическим, строго повторяющимся с периодом равным времени одного оборота НВ.
Момент горизонтальных шарниров втулки НВ (Мгш).
На режиме осевого обтекания НВ равнодействующая сил лопастей Rн направлена вдоль оси НВ и приложена в центре втулки. На режиме косой обдувки сила Rн отклоняется в сторону завала конуса. Из-за разноса горизонтальных шарниров аэродинамическая сила Rн не проходит через центр втулки и между вектором силы Rн и центром втулки образуется плечо. Возникает момент Мгш, называемый инерционным моментом горизонтальных шарниров втулки НВ. Он зависит от разноса lr горизонтальных шарниров. Момент горизонтальных шарниров втулки НВ Мгш увеличивается с увеличением расстояния lr и направлен в сторону завала конуса НВ.
Наличие разноса горизонтальных шарниров улучшает демпфирующее свойство НВ, т.е. улучшает динамическую устойчивость вертолета.
Равновесие лопасти относительно вертикального шарнира (ВШ).
Во время вращения НВ лопасть отклоняется на угол x. Угол качания x измеряется между радиальной линией и продольной осью лопасти в плоскости вращения НВ и будет положительным, если лопасть поворачивается относительно радиальной линии назад (отстает) (рис. 12.13.).
В среднем угол качания равен 5-10о, а на режиме самовращения он отрицателен и равен 8-12о в плоскости вращения НВ. На лопасть действуют следующие силы:
- сила лобового сопротивления Хл, приложена в центре давления;
- центробежная сила, направленная по прямой соединяющей центр массы лопасти и ось вращения НВ;
- инерционная сила Fин, направленная перпендикулярно оси лопасти и противоположно ускорению, приложена в центре масс лопасти;
- Знакопеременные силы Кориолиса Fк, приложенные в центре масс лопасти.
Возникновение силы Кориолиса объясняется законом сохранения энергии.
Энергия вращения зависит от радиуса ,если радиус уменьшился, то часть энергии используется на увеличение угловой скорости вращения.
Поэтому, когда происходит взмах лопасти вверх, уменьшаются радиус rц2 центра масс лопасти и окружная скорость, появляется кориолисово ускорение, стремящиеся ускорить вращение, а значит и сила - сила Кориолиса, которая поворачивает лопасть вперёд относительно вертикального шарнира. При уменьшении угла взмаха кориолисово ускорение,а значит ,и сила будет направлена против вращения. Сила Кориолиса прямо пропорциональна весу лопасти, частоте вращения НВ, угловой скорости взмаха и углу взмаха
Выше перечисленные силы образуют моменты, которые на каждом азимуте похождения лопасти должны быть уравновешены
 . (12.15.)
. (12.15.)
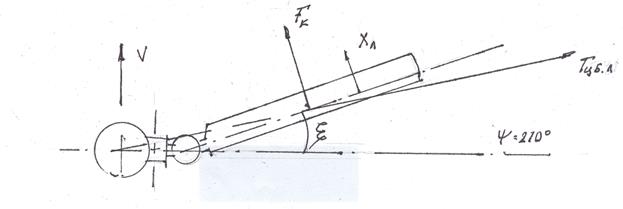
Рис.12.13.. Равновесие лопасти относительно вертикального шарнира (ВШ).
Возникновение моментов на НВ.
При работе НВ возникают следующие моменты:
- крутящий момент Мк, создается силами аэродинамического сопротивления лопастей, определяется параметрами НВ;
- реактивный момент Мр, приложен к главному редуктору и через раму редуктора на фюзеляже.;
- крутящий момент двигателей, передаваемый через главный редуктор на вал НВ, определяется крутящим моментом двигателей.
Крутящий момент двигателей направлен по вращению НВ, а реактивный и крутящий момент НВ – против вращения. Крутящий момент двигателя определяется расходом топлива, программой автоматического регулирования, внешними атмосферными условиями.
На установившихся режимах полета Мк = Мр = - Мдв.
Крутящий момент НВ иногда отождествляют с реактивным моментом НВ или с крутящим моментом двигателей, но как видно из выше приведенного физическая сущность этих моментов различна.
Критические зоны обтекания НВ.
При косой обдувке на НВ, образуются следующие критические зоны (рис. 12.14.):
- зона обратного обтекания;
- зона срыва потока;
- зона волнового кризиса;
Зона обратного обтекания. В районе азимута 2700 в горизонтальном полете образуется зона, в которой комлевые сечения лопастей обтекаются не с передней, а с задней кромки лопасти. Участок лопасти находящийся в этой зоне в создании подъемной силы лопасти не участвует. Эта зона зависит от скорости полёта, чем больше скорость полета, тем больше зона обратного обтекания.
Зона срыва потока. В полете на азимуте 2700 – 3000 на концах лопастей за счет маха лопасти вниз увеличиваются углы атаки сечения лопасти. Этот эффект усиливается при увеличении скорости полета вертолета, т.к. при этом возрастают скорость и амплитуда махового движения лопастей. При значительном увеличении шага НВ или увеличении скорости полета, в этой зоне происходит срыв потока (рис. 12.14.) за счёт выхода лопастей на закритические углы атаки, что приводит к уменьшению подъёмной силы и увеличению лобового сопротивления лопастей, находящихся в этой зоне. Тяга несущего винта в этом секторе падает и при большом превышении скорости полёта на НВ появляется значительный кренящий момент.
Зона волнового кризиса. Волновое сопротивление на лопасти возникает в районе азимута 900 на большой скорости полета, когда скорость обтекания лопасти достигает местной скорости звука, и образуются местные скачки уплотнения, что вызывает резкое увеличение коэффициента Схо за счет возникновения волнового сопротивления
Схо=Схтр+Схв. (12.18.)
Волновое сопротивление может в несколько раз превосходить сопротивление трения, а т.к. скачки уплотнения на каждой лопасти появляются циклически и на небольшой промежуток времени, то это вызывает вибрацию лопасти, которая увеличивается с ростом скорости полета. Критические зоны обтекания несущего винта уменьшают эффективную площадь несущего винта, а значит и тягу НВ, ухудшают аэродинамические и эксплутационные характеристики вертолёта в целом, поэтому ограничения полётов вертолётов по скорости связаны с рассмотренными явлениями.
.«Вихревое кольцо».
Режим вихревого кольца возникает при малой горизонтальной скорости и большой вертикальной скорости снижения вертолета при работающих двигателях вертолета.
При снижении вертолёта в таком режиме, на некотором расстоянии под НВ образуется поверхность а-а, где индуктивная скорость отбрасывания  становится равной скорости снижения Vy (рис.12.15). Достигая этой поверхности, индуктивный поток поворачивается навстречу НВ, частично им захватывается и снова отбрасывается вниз. При увеличении Vy, поверхность а-а приближается к НВ, и при некоторой критической скорости снижения почти весь отбрасываемый воздух снова подсасывается несущим винтом, образуя вокруг винта вихревой тор. Наступает режим вихревого кольца.
становится равной скорости снижения Vy (рис.12.15). Достигая этой поверхности, индуктивный поток поворачивается навстречу НВ, частично им захватывается и снова отбрасывается вниз. При увеличении Vy, поверхность а-а приближается к НВ, и при некоторой критической скорости снижения почти весь отбрасываемый воздух снова подсасывается несущим винтом, образуя вокруг винта вихревой тор. Наступает режим вихревого кольца.
Рис12.14. Критические зоны обтекания НВ.
В этом случае общая тяга НВ уменьшается, вертикальная скорость снижения Vy возрастает. Поверхность раздела а-а периодически разрывается, вихри тора резко изменяют распределение аэродинамической нагрузки и характер махового движения лопастей. В результате тяга НВ становится пульсирующей, возникает тряска и броски вертолета, ухудшается эффективность управления, указатель скорости и вариометр дают неустойчивые показания.
Чем меньше установочный угол лопастей и скорость горизонтального полета, больше вертикальная скорость снижения тем интенсивнее проявляется режим вихревого кольца. снижения на скоростях полета от 40 км/час и менее.
Для предотвращения попадание вертолета в режим «вихревого кольца» необходимо выполнять требования РЛЭ по ограничению вертикальной скорости
Дата добавления: 2017-06-13; просмотров: 5792;
Поиск по сайту
Узнать еще
- I. ОСОБЕННОСТИ ДЕЛОВОГО И ЛИЧНОСТНОГО ОБЩЕНИЯ В СОВМЕСТНОЙ ДЕЯТЕЛЬНОСТИ
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла
- II. Особенности политического устройства Ирана
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения
- II. РЕЖИМ И ОСОБЕННОСТИ ЛИЧНОЙ ГИГИЕНЫ
- III. Особенности политической элиты России.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
