ИССЛЕДОВАНИЕ ЗАКОНОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Основные понятия и закономерности
Вращательным движением тела называется такое движение, при котором все точки движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
При вращательном движении тела изменение его кинематических и динамических характеристик зависит от вращающего момента, действующего на тело, и момента инерции тела.
Основными кинематическими характеристиками вращательного движения являются угловая скорость ω и угловое ускорение ε:
 ,
,  или
или  , (2.1)
, (2.1)
где φ – угловое перемещение тела или угол поворота.
Связь между линейной υ и угловой ω скоростями вращающегося тела и линейным аτ и угловым ε ускорениями можно установить, если выразить длину дуги окружности, по которой происходит вращение, через угол поворота φ:
S= φ·r
Тогда:
 ;
;  , (2.2)
, (2.2)
 ;
;  , (2.3)
, (2.3)
где r – расстояние от точки до оси вращения (модуль радиуса – вектора точки).
Угловая скорость ω и угловое ускорение ε – векторные величины. Вектор  направлен по оси вращения так, что из его конца вращение видно происходящим против часовой стрелки (правый винт, рисунок 2.1,а).
направлен по оси вращения так, что из его конца вращение видно происходящим против часовой стрелки (правый винт, рисунок 2.1,а).
Направление вектора  совпадает с направлением вектора
совпадает с направлением вектора  , если возрастает, и противоположно, если убывает (рисунок 2.1, б, в).
, если возрастает, и противоположно, если убывает (рисунок 2.1, б, в).
При вращательном движении тела изменение его кинематических и динамических характеристик от момента инерции тела и действующего на тело вращающего момента.
а б в
Рисунок 2.1
Вращающим моментом или моментом вращающей силы называется векторная величина  , равная векторному произведению радиуса-вектора
, равная векторному произведению радиуса-вектора  (проводится от центра вращения точки О в точку приложения силы, точку А) на вектор силы
(проводится от центра вращения точки О в точку приложения силы, точку А) на вектор силы  (рисунок 2.2 )
(рисунок 2.2 )
а б
Рисунок 2.2
 , (2.4)
, (2.4)
где  – псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от
– псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от  к
к  (рисунок 2.2). Векторы , и образуют правую тройку векторов.
(рисунок 2.2). Векторы , и образуют правую тройку векторов.
Модуль момента силы равен
 , (2.5)
, (2.5)
где r sinα = l – плечо силы F (рисунок 2.2,б)
l=OC=r sinα – кратчайшее расстояние от оси вращения до прямой, вдоль которой действует сила .
Твердое тело представляет собой совокупность материальных точек массой mi . Момент сил, действующих на материальную точку, равен
 , (2.6)
, (2.6)
где  – сумма внутренних
– сумма внутренних  и внешних
и внешних  сил, действующих на отдельную точку i (рисунок 2.3).
сил, действующих на отдельную точку i (рисунок 2.3).
Момент сил, действующих на материальные точки:
 (2.7)
(2.7)
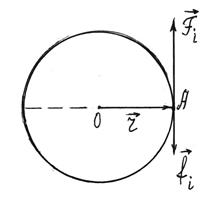
Рисунок 2.3
По второму закону Ньютона  , где
, где  – линейное ускорение материальной точки, связанное с угловым ускорением соотношением:
– линейное ускорение материальной точки, связанное с угловым ускорением соотношением:
 , (2.8)
, (2.8)
следовательно,  , а момент силы
, а момент силы  равен
равен
 , (2.9)
, (2.9)
где  – момент инерции материальной точки равен произведению массы точки mi на квадрат расстояния ri от оси вращения в точке О до точки А.
– момент инерции материальной точки равен произведению массы точки mi на квадрат расстояния ri от оси вращения в точке О до точки А.
Соотношение (2.7) можно записать в виде:
 , (2.10)
, (2.10)
где  – вращающий момент внутренних сил равен нулю (по третьему закону Ньютона).
– вращающий момент внутренних сил равен нулю (по третьему закону Ньютона).
Поэтому момент внешних сил, действующих на тело, – вращающий момент
 , (2.11)
, (2.11)
Следовательно, учитывая соотношения (2.9) и (2.11), имеем
 , (2.12)
, (2.12)
где  – момент инерции твердого тела относительно данной оси вращения.
– момент инерции твердого тела относительно данной оси вращения.
Момент внешних сил, действующих на тело, равен произведению момента инерции тела на угловое ускорение
 . (2.13)
. (2.13)
Полученное соотношение (2.13) – основной закон динамики вращательного движения.
Из закона динамики вращательного движения следует, что момент силы и угловое ускорение совпадают по направлению.
Для тела плотностью ρ момент инерции вычисляется суммированием моментов инерции всех его материальных точек:
 , (2.14)
, (2.14)
где  – бесконечно малая масса тела.
– бесконечно малая масса тела.
Момент инерции является физической величиной, характеризующей инертность тела при вращательном движении под действием вращающего момента (аналогично массе тела при поступательном движении, но m = const).
Момент инерции тела зависит от формы тела, его размеров и расположения тела относительно оси вращения.
Момент инерции тела относительно произвольной оси вращения определяется по теореме Штейнера. Момент инерции тела I относительно произвольной оси вращения ОО равен сумме момента инерции тела I0 относительно оси О/О/, проходящей через центр массы тела параллельно оси ОО, и произведения массы тела m на квадрат расстояния d между параллельными осями (рисунок 2.4).
 (2.15)
(2.15)
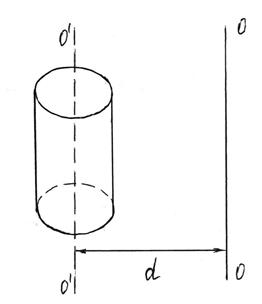
Рисунок 2.4
Дата добавления: 2021-02-19; просмотров: 455;
Поиск по сайту
Узнать еще
- II. Ситуационные (нестандартные) движения
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III. Исследование личностных особенностей подростков
- Im7im9im11Исследование памяти
- VI. АГРАФИЯ. ИССЛЕДОВАНИЕ ПИСЬМА
- VII. АЛЕКСИЯ. ИССЛЕДОВАНИЕ ЧТЕНИЯ
- А. Уравнения движения точки в декартовых координатах
- А.4 Общее уравнение движения мобота.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
