Исполнительные механизмы и регулирующие органы.
Исполнительное устройство АСР состоит из двух функциональных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО). Исполнительный механизм под действием управляющего воздействия регулятора y(t) преобразует вспомогательную энергию в перестановочное усилие, благодаря чему перемещается затвор регулирующего органа, изменяющего, например, количество вещества или энергии, поступающего в объект (подача пара, электроэнергии, газа и т.п.). Дополнительно с помощью ИМ решаются и другие задачи управления: пуск и останов самого технологического процесса, а также различных машин и механизмов по ходу процесса.
Основными требованиями к ИМ являются: повышенная надежность, быстродействие, минимальные габариты и масса, защита от перегрузок, возможность перехода (если не работает автоматика) на ручное управление, простота реверсирования, пожаро- и взрывобезопасность .
Исполнительные механизмы бывают: электрические, пневматические, гидравлические, а так же комбинированные.
Достоинством электрических ИМ является возможность дистанционного управления и простота конструкции. Они в свою очередь подразделяются на электродвигательные и электромагнитные (соленоидные).
Электродвигательные исполнительные механизмы.Основным элементом их конструкции является электродвигатель. Как правило используются двигатели переменного тока. В зависимости от диапазона поворота выходного вала ИМ бывают однооборотные и многооборотные. Важными характеристиками ИМ являются номинальный крутящий момент на валу (Н· м), который указывается в числителе индекса механизма, и время одного оборота вала (с).
Позиционные ИМ предназначены для перемещения регулирующего органа в одно из фиксированных положений . Примерами таких ИМ являются механизмы для двухпозиционного регулирования типа ДР-М, ДР-1М и др. Эти ИМ чаще работают в комплекте с двухпозиционными регуляторами.
Пропорциональные ИМ обеспечивают перемещение РО в соответствии с величиной управляющего воздействия. К ним относятся ИМ типа ПР-1М, ПР-М, ИМ-2/120, МЭО и др. Пропорциональные ИМ используются в системах, оснащенных регуляторами непрерывного действия.
Системы управления ИМ делятся на релейно-контактные и бесконтактные. Релейно-контактное управление осуществляется посредством различных реле, трехфазных релейных контакторов и магнитных пускателей. Основным недостатком релейно-контактных систем управления электроприводами ИМ является их пониженная надежность, что связано с подгоранием и залипанием контактов. Поэтому в последние десятилетия все большее распространение стали получать бесконтактные системы управления электродвигательными ИМ.
Релейно-контактное управление ИМ.Блок-схема управленияможет быть представлена в следующем виде

Рис.3.6. Блок-схема релейно-контактного управления ИМ.
Сигнал управления регулирующего устройства у(t), которым в частности может быть выходной сигнал чувствительного элемента xчэ (например, положение поплавкового уравнемера), воздействует на включение реле, которое своими контактами включает реверсивный магнитный пускатель МП, включающий соответствующую фазу силовой цепи (Силов. цепь) питания реверсивного двигателя РД, выходной вал которого сочленен с редуктором (Ред), управляющим РО, а последний изменяет свое положение на увеличение или уменьшение количества вещества или энергии в объект регулирования.
Бесконтактное управление ИМ.Для такого управления часто используются дроссели насыщения или магнитные усилители МУ. В общем случае блок-схему управления ИМ бесконтактным способом можно представить так:

Рис.3.7. Блок-схема бесконтактного управления ИМ.
В этих схемах обязательным является применение усилителей У, обусловленное тем, что мощности выходного сигнала xчэ ЧЭ (датчика), несущего информацию об изменении технологических параметров, как правило очень малы.
Электромагнитные ИМ. По виду движения исполнительного органа они подразделяются на ходовые и электромагнитные муфты с вращательным движением. Электромагнитные ИМ применяются в системах позиционного (чаще двухпозиционного) регулирования, а также для привода различных механизмов в системах автоматического дистанционного управления. Основным рабочим органом ИМ с прямолинейным движением является тяговый электромагнит (соленоид). Применяются электромагнитные приводы как переменного, так и постоянного тока, однако последние используются реже, так как требуют дополнительных выпрямительных устройств.
Основными достоинствами электромагнитных ИМ являются простота конструкции и высокое быстродействие (по сравнению с электродвигательными механизмами). Однако они развивают меньшие перестановочные усилия и отличаются меньшей надежностью в работе.
Схема электромагнитного соленоидного клапана дана на рис.3.8. При замыкании управляющего контакта К электромагнит ЭМ возбуждается и втягивает якорь, в результате чего клапан открывается. При размыкании контакта К якорь электромагнита под действием возвратной пружины перемещается вниз и клапан закрывается.
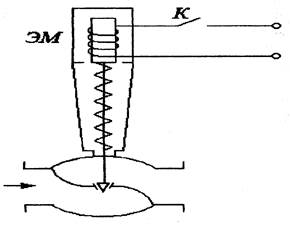
Рис.3.8.Схема электромагнитного клапана
Электромагнитная муфта является связующим звеном между приводом и рабочим механизмом. Они подразделяются на муфты фрикционного сухого трения, вязкого трения индукционные.
Пневматические ИМ особо удобны в условиях центрального пневмохозяйства, не требующего использования индивидуальных компрессоров. Существенным достоинством их является взрыво- и пожаробезопасность, а также самоблокировка при аварийном отключении питания.
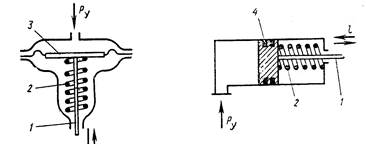
В пневматических исполнительных механизмах механизмах усилие, необходимое для перестановки регулирующего органа, создается управляющим сигналом в виде давления сжатого воздуха Ру,, действующего на мембрану или поршень (рис. 3.9), которые через шток воздействуют на РО (рис.3.10).
а) б)
Рис.3.9. Схемы мембранного (а) и поршневого (б) исполнителных механизмов
1-шток; 2-пружина; 3-мембрана; 4-поршень.
а) б)
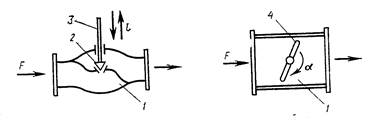
Рис. 3.10. Схемы регулирующих органов:
а– односедельного; б – заслоночного; 1-корпус; 2-затвор; 3-шток; 4-заслонка.
Прямолинейные мембраны или поршневые ИМ, дополненные рычажной передачей, создают поворотное перемещение регулирующего органа (например, заслонки в трубопроводе).
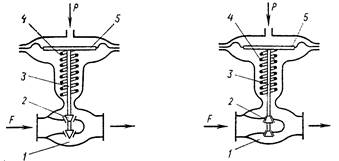
Пневматический мембранный ИМ, сочлененный с РО, называют пневматическим регулирующим клапаном (рис.3.11). По виду запорного устройства пары затвор-седло пневматические клапаны делятся на односедельные и двухседельные. Первые имеют неуравновешенный затвор, так как на него действует выталкивающая сила среды, и поэтому применяются в ИУ малых размеров при низких давлениях среды. Вторые имеют уравновешенный затвор и используются в ИУ больших размеров и при высоких давлениях.
а) б)
Рис. 3.11. Схемы пневматических регулирующих клапанов:
а – нормально открытого (НО); б – нормально закрытого (НЗ);
1-корпус; 2-затвор; 3-шток; 4-пружина; 5-мембрана
Пневматические регулирующие клапаны могут быть «нормально открытыми» и «нормально закрытыми».
Кроме представленных на рис.3.11, регулирующие органы могут быть в виде шаровых затворов (кранов).
Гидравлические исполнительные механизмыв основном бывают поршневого типа. Они применяются при давлении рабочей жидкости в диапазоне 2,5· 106÷ 2· 107 Па, следовательно могут развивать большие перестановочные усилия при небольших размерах.
Дата добавления: 2021-02-19; просмотров: 868;
Поиск по сайту
Узнать еще
- III. Механизмы, средства и методы психологического воздействия.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).
- Анатомо-физиологические механизмы речи
- АРЕНДНЫЕ МЕХАНИЗМЫ В ПРЕДПРИНИМАТЕЛЬСТВЕ
- Артериальная гиперемия, ее причины, признаки, механизмы развития. Особенности микроциркуляции, исходы и последствия различных видов артериальной гиперемии.
- Артериальная гиперемия: виды, причины, механизмы развития, проявления
- Артериальная гипотония. Гемодинамические механизмы гипотензивных состояний. Конституциональная гипотензия. Острые и хронические патологические гипотензии.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
