Объекты регулирования и их свойства
Обоснованный выбор и расчет регулятора в первую очередь определяется достоверностью математической модели объекта регулирования (ОР) (машина, аппарат, технологический процесс), к которому подключается автоматический регулятор, обеспечивающий поддержание или изменения по заданным условиям какого-либо параметра объекта.
Технологический процесс, как правило, характеризуется несколькими регулируемыми величинами. Например, в тепловом объекте регулирования выходными величинами (наряду с температурой) могут быть уровень, давление, химический состав среды и другие. Таким образом, промышленные установки представляют собой сложные объекты с несколькими регулируемыми величинами. Однако такие объекты можно расчленить (декомпозировать) на ряд простых объектов, характеризуемых одной регулируемой величиной. В простейшем виде объект регулирования можно представить в виде некоторого объема или емкости, в которые непрерывно поступают и из которого одновременно отбираются вещество или энергия.
Установившийся режим в объекте, характеризуемый неизменным значением регулируемой величины, наступает при равенстве количества поступающего и расходуемого вещества или энергии. При изменении нагрузки или появлении других возмущающих воздействий (например, изменение параметров объекта, изменение окружающей среды и др.) включая изменение по каналу регулирующего воздействия (например, напряжение питающего тока, температура и давление технологического пара и т.д.), возникают нарушения установившегося состояния. Восстановление равновесия достигается путем изменения регулирующего воздействия на объект.
Объекты регулирования характеризуются следующими свойствами: самовыравниванием, емкостью и запаздыванием.
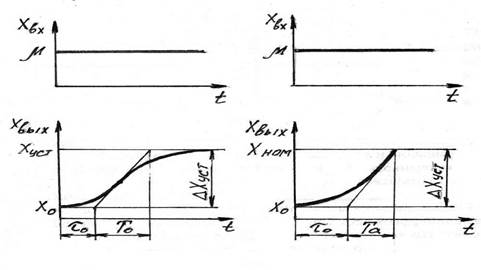
Самовыравнивание – свойство объекта самостоятельно восстанавливать нарушенное состояние равновесия за счет изменения регулируемой величины. Объекты с самовыравнивание – статические объекты, а без самовыравнивания – астатические (рис.3.4.).
Статические объекты характеризуются коэффициентом самовыравнивания или обратным ему коэффициентом передачи объекта, а астатические объекты – скоростью разгона.
Емкостью объекта называется свойство объекта регулирования накапливать энергию или вещество. Объекты бывают одноемкостные и многоемкостные. Одноемкостные объекты характеризуются одной постоянной времени.
Запаздывание (время запаздывания) характеризуется временем между моментом нанесения возмущающего воздействия (в частности, изменением входной величины) и началом изменения регулируемой (выходной) величины. При этом различают: переходное или емкостное запаздывание и транспортное или чистое запаздывание.
Переходное (емкостное) запаздывание обусловлено передачей воздействия через распределенные емкости многоемкостного объекта и определяется отрезком на оси времени, отсекаемым касательной, проведенной к наиболее крутой части кривой разгона (рис.3.4.).
а) б)
Рис.3.4. Типовые характеристики разгона объектов:
а) – объект с самовыравниванием; б) – объект без самовыравнивания.
Транспортное (чистое) запаздывание характеризуется временем передачи воздействия от момента нанесения его до места его реализации (вход в объект). Например, при передаче вещества по транспортеру или трубопроводу это есть время, в течении которого отсутствует отклонение регулируемой величины после нанесения воздействия на транспортер или трубопровод.
Свойства объектов регулирования определяются из их математических моделей, которые получаются аналитическим или экспериментальным способами. Аналитический способ построения математической модели объекта осуществляется на основе физико-механических закономерностей, определяющих характер процессов в объекте, сопряжен с большими трудностями, а уравнения математической модели получаются достаточно сложными. Поэтому часто снимают экспериментальные динамические характеристики объекта (кривые разгона, импульсные характеристики, частотные характеристики) и по ним определяют параметры объекта регулирования, используемые в дальнейшем для выбора закона регулирования и расчета оптимальных параметров настройки регулятора. При экспериментальном определении динамических характеристик обычно используются не абсолютные значения текущих величин, а их отклонения от номинального, установившегося или начального значения. Поэтому в получающихся дифференциальных уравнениях, передаточных функциях используются приращения Δx, Δy, Δμ и т.д. Но с целью упрощения написания уравнений знак Δ опускается и уравнение записывается с применением обозначений самих величин x, y, μ и т.д., но подразумевая на самом деле под этими обозначениями их отклонения.
Объекты регулирования можно представить определенной комбинацией типовых динамических звеньев. Так, одноемкостные объекты с самовыравниванием представляют последовательным соединением двух типовых звеньев: апериодического (инерционного) и запаздывающего звеньев. А объекты без самовыравнивания представляют последовательным соединением интегрирующего и запаздывающего звеньев. Большинство объектов удовлетворяют таким допущениям. На рис.3.4. приведены типовые характеристики разгона таких объектов, изображающие изменения выходной величины xвых при ступенчатом входном воздействии μ. Здесь же показана методика определения параметров.
Основными параметрами объектов являются следующие:
Для объектов с самовыравниванием
1. Коэффициент передачи объекта
| К0= | Хуст – Х0 | , (3.2) |
| μ |
определяемый в единицах изменения выходной величины на единицу перемещения регулирующего органа.
2. Постоянная времени Т0 в секундах. Она определяется отрезком на оси абсцисс между точками пересечения вертикалей, опущенных из точек пересечения касательной с начальным и установившимся значениями выходной величины на ось абсцисс.
3. Время запаздывания τ0 в секундах, которое определяется отрезком оси абсцисс от начала приложения входного воздействия до точки пересечения вертикали, опущенной из точки пересечения касательной с начальным значением выходной величины
Передаточная функция (см. определение 3.8.2.) такого объекта будет иметь вид
W0 (p) = [ K0 / (T0∙ p + 1)] ∙ e - τ0∙p . (3.3)
Для объекта без самовыравнивания:
1. Время разгона Та в секундах до значения выходного параметра, принятое за номинальное; оно определяется отрезком на оси абсцисс между точками пересечения вертикалей, опущенных из точек пересечения касательной с начальным и номинальным значениями выходной величины на ось абсцисс.
2. Скорость разгона
ε0 = [ ( XНОМ – Х 0) / Та ] / μ , (3.4)
определяется в единицах изменения выходной величины в секунду на единицу перемещения регулирующего органа. Этот параметр можно рассматривать как коэффициент передачи объекта без самовыравнивания, представляющий отношение скорости изменения выходной величины к величине входного воздействия.
3. Время запаздывания τ0 в секундах, которое определяется отрезком на оси абсцисс от начала приложения входного воздействия до точки пересечения вертикали, опущенной из точки пересечения касательной с начальным значением выходной величины на ось абсцисс.
Передаточная функция такого объекта имеет вид
W0 (p) = ( ε0 / p ) ∙ e - τ0∙p .(3.5)
При обработке характеристик разгона касательная к кривой разгона проводится для объектов с самовыравниванием в точке перегиба кривой, характеризуемой наибольшей скоростью изменения выходной величины (см. рис. 3.4,а). Для объектов без самовыравнивания она соответствует участку установившейся скорости изменения выходной величины (рис. 3.4,б).
Дата добавления: 2021-02-19; просмотров: 1259;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- I. Товар и его свойства.
- II.3. Физико-химические свойства нефтей и природных газов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- X. Электроповерхностные свойства дисперсных систем
- А) Определяется механическими и тепловыми свойствами
- Абстрактные автоматы. Методы описания и свойства
- Автоматика регулирования

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
