Автоматические регуляторы и законы регулирования
3.3.1. Классификация линейных регуляторов
По функциональному назначению и конструктивномуисполнению
регуляторы можно квалифицировать следующим образом:
1. По виду регулируемой величины: регуляторы температуры, давления, уровня, влажности и т. д.
2. Регуляторы прямого и непрямого действия: в регуляторах прямого действия измерительное устройство без дополнительного источника энергии непосредственно воздействует на регулируемый орган, через который проходит в объект вещество или энергия; в регуляторах непрямого действия имеется блок усиления и преобразования, который питается от дополнительного источника энергии и усиливает мощность выходного сигнала до величины, способной управлять мощными регулирующими органами с большими потоками вещества и энергии.
3. В зависимости от рода вспомогательной энергии различают регуляторы электрические, пневматические, гидравлические и комбинированные (например, электропневматические и др.).
В большинстве случаев предпочтение отдается электрическим регуляторам благодаря компактности, малой массе, небольшим габаритам, возможности управлять на больших расстояниях, широкими возможностями усиления и преобразования сигналов.
В тех случаях, когда требуются большие усилия и моменты для привода рабочих органов, и необходимо соблюдать условия взрыво- пожаро-безопасности применяют гидравлические или пневматические регуляторы, обладающие высокой надежностью в работе и сравнительной простотой в обслуживании. Однако потребность в больших сетях трубопроводов, необходимость иметь насосные и компрессорные станции значительно усложняет автоматическую систему при использовании таких регуляторов. Распространенными являются комбинированные регуляторы, в которых измерительная часть – электрическая, а исполнительный элемент – гидравлический или пневматический.
4. По функциональной зависимости между регулирующим воздействием у( t ) и отклонением регулируемой величины от заданного значения ∆ (t)
у (t) = f (Δ(t)),
различаются регуляторы, работающие по определенным типовым законам. Уравнения, определяющие закон регулирования, могут быть линейными и нелинейными. Часто на практике уравнения регуляторов упрощают, пренебрегая нелинейностями, когда это возможно.
Для АСР, действующих по отклонению регулируемой величины от заданного значения, закон регулирования в общем виде записывается так
y( t ) = F·[Δ(t) ]. (3.6) Первая часть выражения (3.6) может содержать не только ошибку Δ, но и ее производные и интегралы. Производные и интегралы вводятся в закон регулирования для улучшения свойств АСР - повышение устойчивости, точности и качества процесса регулирования.
Рассмотрим выражение(3.6) применительно к типовым законам регулирования.
Пропорциональный закон регулирования(П-регулятор) – простейший регулятор, в котором регулирующее воздействие у(t) зависит только от ошибки Δ(t)
у(t) = КР·Δt, или у = КР·Δ, (3.7)
где КР называется коэффициентом усиления регулятора.
В промышленных регуляторах предусмотрена возможность изменения КР и поэтому он является параметром настройки регулятора. Изменяя КР, мы изменяем величину регулирующего воздействия, соответствующую одной и той же ошибке Δ(t). Достоинства регулятора – его простота. Недостатки – регулятор не может полностью ликвидировать ошибку.
Интегральный закон регулирования (И-регулятор). Статическую ошибку можно исключить, если использовать интегральный закон регулирования
у = КИ ∫ Δ dt (3.8)
Коэффициент КИ = 1/ТИ, где ТИ- параметр настройки регулятора, называемый постоянной времени интегрирования
Недостаток регулятора: динамические свойства хуже, чем у П-регулятора, т. е. процесс регулирования отстает от процесса появления и изменения отклонения, что приводит (рис.3.5.) к слабо затухающим колебаниям регулируемой величины около заданного xЗАДее значения (удлиняется время регулирования).
Пропорционально-интегральный закон регулирования(ПИ-регулятор). Устранить недостаток и сохранить преимущества пропорционального и интегрального регуляторов позволяет регулятор, обеспечивающий закон регулирования:
У = КР · ( Δ + 1 /ТИ ∫ Δ·dt ), (3.9)
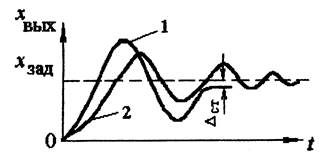
Рис. 3.5. Характер изменения регулируемой величины (хВЫХ)
в П-регуляторах (кривая 1) и в И-регуляторах (кривая 2 )
Как видно, ПИ-регулятор имеет два параметра настройки – КР и ТИ. Параметр ТИ характерезует интенсивность ввода интеграла в закон регулирования.
Пропорционально-дифференциальныйзакон регулирования(ПД-регулятор). Введение в закон регулирования производной отклонения регулируемой величины улучшает динамические свойства АСР,
y = КР ∙ (Δ + T Д ∙ d Δ/dt). (3.10)
Регулятор имеет два параметра настройки – КР и ТД.. Коэффициент ТД называется временем дифференцирования, или временем предварения, т.к. наличие производной в законе регулирования обуславливает реакцию не только на саму ошибку Δ, но и на тенденцию ее изменения, как бы предвидя развитие событий.
Пропорционально – интегрально - дифференциальный закон регулирования (ПИД-регулятор) описывается уравнением
y = КР · ( Δ + 1 /ТИ ∫ Δ·dt + T Д ∙ d Δ/dt) . (3.11)
Наличие трех составляющих в законе регулироврания (3.11) позволяет добиваться высокого качества процесса регулирования как при установившемся режиме, так и при неустановившихся режимах работы АСР.
Выше рассмотренные законы регулирования являются наиболее простыми, линейными и непрерывными. Для более сложных АСР, например, комбинированных, применяются регуляторы, закон регулирования которых содержит в правой части слагаемые, зависящие от измеряемого возмущения
f (t), его интегралов и производных.
3.3.2. Нелинейные законы регулирования
Наиболее распространенными среди этих законов являются релейные законы, при этом наиболее часто применяется двухпозиционный релейный закон регулирования. В этом случае регулирующий орган может занимать два фиксированных положения (позиции), соответствующее двум фиксированным значениям регулирующего воздействия, вырабатываемого релейным двухпозиционными регуляторами (Рп-регуляторами).
Дата добавления: 2021-02-19; просмотров: 1059;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
