Компьютер управления полетом
Управление самолетом может осуществлять экипаж самостоятельно при помощи органов управления или экипаж посредством системы автоматического пилотирования. В последнем случае экипаж может использовать многофункциональные блоки контроля и отображения (MCDU) в качестве принципиального интерфейса взаимодействия с самолетом и системой автоматического пилотирования. Компьютер управления полетом (FMC) – это компьютер, с которым экипаж взаимодействует через блоки MCDU. Он связан с системой автоматической тяги (или автоматом тяги) и системой автопилотирования. FMC изолирует экипаж от управляющего контура, выполняя роль контроля и наблюдения внутри встроенной автоматической системы управления полетом. Такая автоматическая работа обеспечивает более точное следование траектории полета и управление двигателем.
Система управления полетом сочетает функции навигации, управления производительностью, планирования полета, трехмерного руководства и контроля вдоль всей предварительно запланированной траектории полета.
Помимо обширной навигационной базы данных, система использует детализированную базу данных по аэродинамике и двигателю специфического самолета. Эта база данных содержит информацию о профиле полета для таких фаз, как взлет, взлет на пониженной тяге (Flex-take-off), набор высоты, крейсерский режим, снижение, удержание и уход на второй круг. Система также учитывает нестандартные температуры и требования по отбору воздуха. Для крейсерского режима доступны специфические данные для максимальной экономичности, длине дистанции и выбранной скорости/числу М (если этого требует служба УВД). Экипаж задает индекс стоимости, который представляет сравнительный анализ между стоимостью топлива и относительной стоимостью полетного времени. Используются модели профилей ветра и температуры вдоль траектории полета, которые в фазе планирования основываются на данных, введенных экипажем. Позднее, во время полета, система использует фактические величины параметров, измеренные с помощью сенсоров.
Т.о. система способна выполнять перспективное планирование на весь полет, создавая план полета, который минимизирует затраты. Во время полета с целью минимизации путевых затрат предлагаются альтернативные варианты плана полета, основанные на конкретных полетных данных. С помощью MCDU пилоты отслеживают выполнение траектории, получают сообщения и предложения (например, для ступенчатого набора высоты) и принимают прогнозируемую информацию (например, остаток топлива по прибытию). Они могут также исследовать обстоятельства и альтернативы активному плану полета.
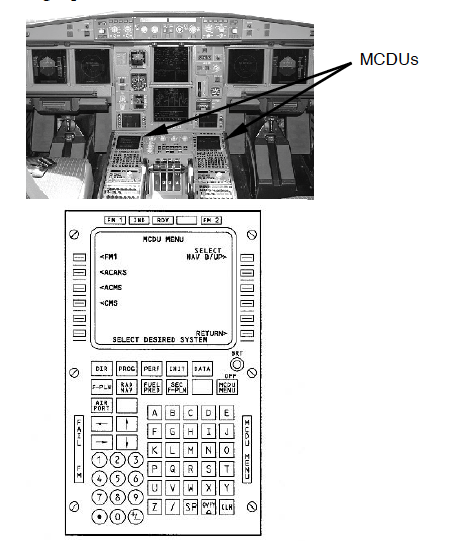
Рис. 6.19. MCDU самолета А340-600 в качестве интерфейса с компьютером управления полетом
После активации экипажем, система управления полетом посылает в систему автопилотирования и автомата тяги управляющие команды, влияющие на выполнение полетного плана. Режим работы двигателя для соответствующей фазы полета перед управляющими воздействиями системы автомата тяги точно рассчитывается компьютером FMC. В крейсерском полете незначительные корректировки скорости/числа М выполняются не с помощью манипуляций с тягой, а с помощью отклонения руля высоты по команде автопилота. Допускается плавный набор высоты или снижение самолета в рамках диапазона ±50 футов для корректировки небольших отклонений воздушной скорости. Руль высоты намного более восприимчив к небольшим изменениям, чем двигатель. Поэтому режим работы (уровень тяги) остается неизменным для таких небольших корректировок воздушной скорости. Т.о. работа системы управления полетом обеспечивает самую экономичную эксплуатацию.
Дата добавления: 2016-11-04; просмотров: 4097;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Функционально-структурная организация и программное обеспечение персонального компьютера
- Автоматизации и управления
- Автоматизация как направление дальнейшего совершенствования управления силами и средствами
- Автоматизированная система диспетчерского управления
- Автоматизированная система оперативного управления перевозками (АСОУП)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
