Разработанных после 1987 г. (по ГОСТ 26772 – 85 )
| Число выводов | Наименование вывода фазы | Обозначение выводов | |
| начало | конец | ||
| Первый | 1U— 2N | 2U | |
| Второй | 1V—2N | 2V | |
| Третий | 1W—2N | 2W | |
| 9 | Первый Второй Третий | 1U – 3N 1V – 3N 1W – 3 N | 2U; 3U 2V; 3V 2W; 3W |
| Первый | 1U — 2N | 2U | |
| 3U—4N | 4U | ||
| Второй | 1V—2N | 2V | |
| 3V – 4N | 4V | ||
| Третий | 1W – 2N | 2W | |
| 3W – 4N | 4W |
Примечания. 1. В обозначениях раздельных обмоток двигателей, переключаемых на разное число полюсов, меньшая (большая) цифра стоящая перед буквенным обозначением обмотки, соответствут меньшей (большей) частоте вращения.
2. Двойные обозначения (например, 1U – 2N; 1U – 3N и др.) применяют для выводов, которые при одной частоте вращения присоединяют к сети, а при другой частоте вращения замыкают накоротко между собой. Если на доске выводов нет достаточно места для двойного обозначения с обязательным приложением к машине схемы соединений.
3. В чертежах электрических схем соединения с шестью выводными концами на свободном поле схемы при соединении фаз в треугольник допускается применение двойных обозначений (U1W2; V1U2; W1V2), при соединении фаз в звезду – обозначение начал фаз U1, V1, W1 и тройного обозначения (U2; V2; W2) точки звезды.
Выбор схемы полюсно-переключаемых обмоток зависит от того, должен двигатель работать на разных частотах вращения с постоянным моментом или с постоянной мощностью [6].
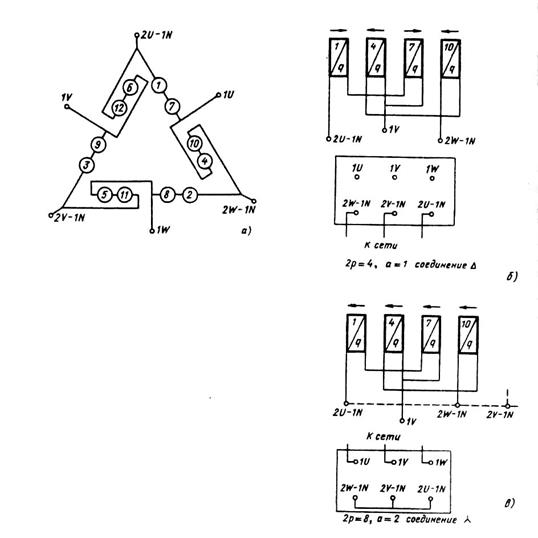
Рис. 3.37. Схемы включения обмоток многоскоростного асинхронного двигателя на
2р = 4/8 при работе с постоянной мощностью:
а – схема соединений катушечных групп обмотки; б – включения обмотки на 2р = 4 при а = 1;
в – включение обмотки на 2р = 8 при а =2.
На рис. 3.37 показаны условные схемы включения двухскоростного асинхронного двигателя на 2р= 4/8, рассчитанного на работу с одной и той же мощностью при 2р = 4 и 2р= 8. На высшей частоте вращения (2р = 4) его обмотку соединяют в треугольник при а = 1, а на низшей (2р= 8) — в звезду при а = 2. При том и при другом числе полюсов катушки обмотки остаются теми же самыми, поэтому их выполняют с шагом, равным или несколько большим полюсного деления при большем числе полюсов.
Существуют схемы обмоток двухскоростных двигателей, позволяющие путем переключения катушечных групп изменять числа полюсов и в отношении, отличном от 1 : 2, с сохранением достаточно высокого обмоточного коэффициента для обеих частот вращения и числа выводных концов обмоток — не более шести. Особенность этих схем заключается в специфической компоновке катушечных групп из разновитковых катушек,
| при которой изменение точек подсоединения обмотки к питающей сети приводит не только к изменению полярности отдельных катушечных групп, но и переключению групп между фазами или к отключению отдельных катушек при работе с одним из возможных чисел полюсов. При переключениях изменяется также и амплитуда МДС обмотки, поэтому такой метод построения схем называют методом «полюсно-амплитудной модуляции» (ПАМ). Принцип переключений, | 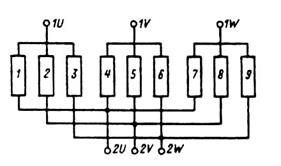 Рис. 3.38. Принципиальная схема двухскоростной обмотки, выпол-ненной по принципу ПАМ:
1 – 9 - элементы обмотки
Рис. 3.38. Принципиальная схема двухскоростной обмотки, выпол-ненной по принципу ПАМ:
1 – 9 - элементы обмотки
|
характерный для данного метода, иллюстрируется схемой, приведенной на рис. 3.38.
Двухскоростные асинхронные двигатели серии 4А и АИ с высотами осей вращения 160…200 мм при соотношении чисел полюсов 6 : 4 имеют две обмотки: основную – двухслойную и дополнительную – однослойную, катушечные группы которых условно показаны на рис. 3.39, а соответственно кружками и прямоугольниками. Основная обмотка — полюсно – переключаемая. При работе на 2р=4 включается только основная обмотка, соединенная треугольником при а = 1 (рис. 3.39, б). При работе двигателя на 2р = 6основная обмотка соединяется в звезду с двумя параллельными ветвями и последовательно с ней включается дополнительная обмотка (рис. 3.39, в).
Для трехскоростных и четырехскоростных асинхронных двигателей используют оба принципа изменения чисел полюсов: устанавливают две независимые обмотки, каждая из которых (в четырехскоростных) или одна из них (в трехскоростных двигателях) выполняется полюсно-переключаемой.
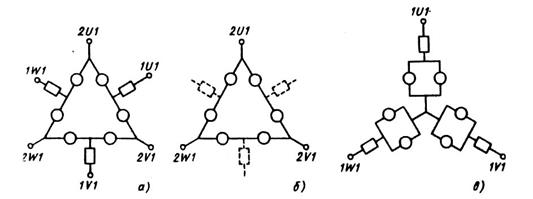
Рис. 3.39 Полюсно – переключаемые обмотки:

 а – выводы обмотки; б – включение основной обмотки на 2р = 4 при а = 1; в – включение основной и дополнительной обмоток на 2р = 6 при а = 2;
а – выводы обмотки; б – включение основной обмотки на 2р = 4 при а = 1; в – включение основной и дополнительной обмоток на 2р = 6 при а = 2;
- элементы основной обмотки, - элементы дополнительной обмотки
В обмотках в большинстве случаев используют более простые схемы переключения числа полюсов в отношении 1 : 2. Так, например, трехскоростные двигатели 4А112М6/4/2 имеют две независимые обмотки, одна из которых рассчитана на 6 полюсов, а вторая (полюсно-переключаемая) — на 2 и 4 полюса; в четырехскоростных двигателях 4А180М12/8/6/4 обе обмотки полюсно – переключаемые: одна на 12 и 6 полюсов, другая на 8 и 4 полюса.
Дата добавления: 2016-11-04; просмотров: 2820;
Поиск по сайту
Узнать еще
- ATTN-последовательность
- C.) Опытным путем (по времени выхода забойной пачки).
- Escape-последовательности
- II. Политическое развитие страны: реформы и их последствия
- III. Последующая обработка.
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- R508 (9,00R20) И-Н142Б НС-12 ГОСТ 5513-86 Made in Russia НКХI871395
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
