Модели замкнутых электромеханических систем
В замкнутой электромеханической системе(ЭМС) с П-регулятором, ДПТ НВ и ШИП обратная связь осуществляется за счет датчика скорости, которым обычно служит тахогенератор. Структурная схема такой ЭМС представлена на рис. 2.38.
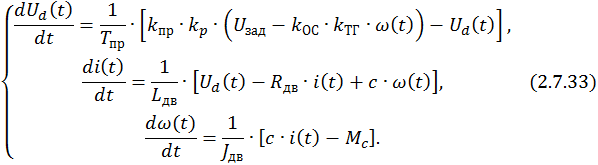
СДУ, описывающая данную ЭМС, будет состоять из трех уравнений – электрического равновесия якорной цепи ДПТ НВ, уравнения движения электропривода и уравнения состояния ШИП.
При составлении уравнения состояния ШИП внесем для удобства коэффициент передачи регулятора kР в передаточную функцию преобразователя. Тогда коэффициент передачи ШИП будет равен произведению kпр⋅ kp, причем

Уравнение состояния преобразователя:

Уравнение электрического равновесия ДПТ НВ –

Уравнение механического равновесия ДПТ НВ –

Рис. 2.38. Структурная схема замкнутой ЭМС с П-регулятором
Разрешая каждое уравнение относительно производных, запишем СДУ в нормальной форме Коши:
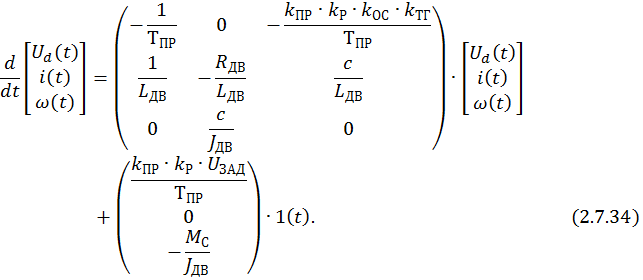
СДУ в матричном виде –
где  – вектор переменных состояний;
– вектор переменных состояний; 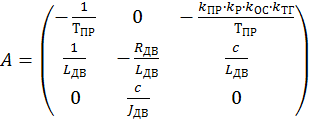 – матрица коэффициентов перед переменными состояния;
– матрица коэффициентов перед переменными состояния; 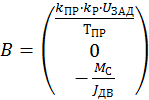 – вектор свободных членов СДУ.
– вектор свободных членов СДУ.
Из полученной математической модели видно, что помимо двух переменных состояния двигателя (тока и скорости) ЭМС имеет третью переменную состояния - выходное напряжение ШИП, обусловленную инерционностью преобразователя.
Дата добавления: 2021-01-26; просмотров: 735;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
