Оценка точности обсервованного места по данным РЛС
Радиальная (круговая) СКП определения места судна по двум радиолокационным расстояниям может быть рассчитана по формуле:

| (21.14) |
где mD1, mD2 – СКП измерения расстояния с помощью РЛС, мили.
Если точность измерения обоих расстояний одинакова (что так и есть), то mD1 = mD2 и формула (21.14) примет вид:
| (21.15) |
При определении места судна по трем радиолокационным расстояниям погрешность обсервованного места может быть рассчитана по формуле:
| (21.16) |
Радиальная (круговая) СКП в определении места судна по радиолокационному пеленгу и расстоянию до ориентиров вычисляется по формуле:

| (21.17) |
Если РЛП и DP до одного ориентира, то θ = 90° (рис. 21.7) и

| (21.18) |
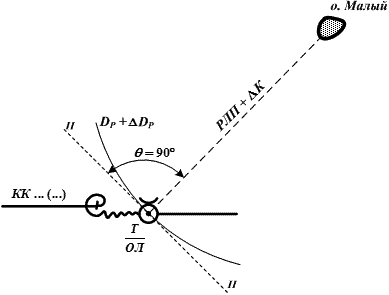
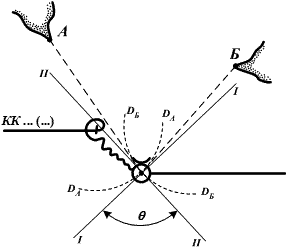
Рис. 21.7. Оценка точности обсервованного места по данным РЛС
Так как расстояние до ориентира измеряется с помощью РЛС с высокой точностью, то погрешности в определении места судна этим способом зависят главным образом от погрешностей измерения РЛП.
Для повышения точности обсервованного с помощью судовой РЛС места нужно стремиться получить не менее 3-х линий положения (3DP, 2DP и РЛП, 2DP и визуальный пеленг и др.).
При наличии 3-х линий положения большой треугольник погрешностей укажет на погрешность или в опознавании ориентиров, или на промахи в наблюдениях.
В практике иногда встречается сложность определения угла пересечения линий положения (θ). Точно угол пересечения линий положения (θ) можно определить двояко:
| 
|
| a) | б) |
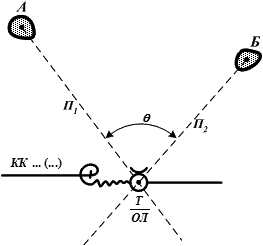
Рис. 21.8. Оценка точности обсервованного места судна
1. Соединив обсервованное место с ориентирами (рис. 21.8а), снять значения этих направлений (П1, П2) и рассчитать значение острого угла, то есть θ = П1 – П2.
2. К дугам окружностей с радиусами, соответствующими измеренным и исправленным расстояниям, в точке их пересечения (обсервованное место) провести касательные (рис. 21.8б) и измерить значение острого угла θ.
Дата добавления: 2021-01-26; просмотров: 735;
Поиск по сайту
Узнать еще
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- II. Оценка материально-производственных запасов
- V. Оценка состояния здоровья детей и подростков
- VIII Места занятий, оборудование и спортивный инвентарь
- А) в средних рядах; б-д) в крайних рядах; е) в торцах; ж-и) в местах перепада высот, деформационных и температурных швов (на парных колоннах)
- А. Наилучшая статистическая оценка
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
